

Fault-tolerant tracking control method for four-wheel distributed electric drive automatic driving vehicle
A technology of automatic driving and control method, applied in the field of vehicles, which can solve the problems of accidents, vehicles deviating from the preset trajectory, unable to return to the vehicle maintenance point, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0027] The specific technical solutions of the present invention are described in conjunction with the examples.
[0028] S0: setting of initial conditions;
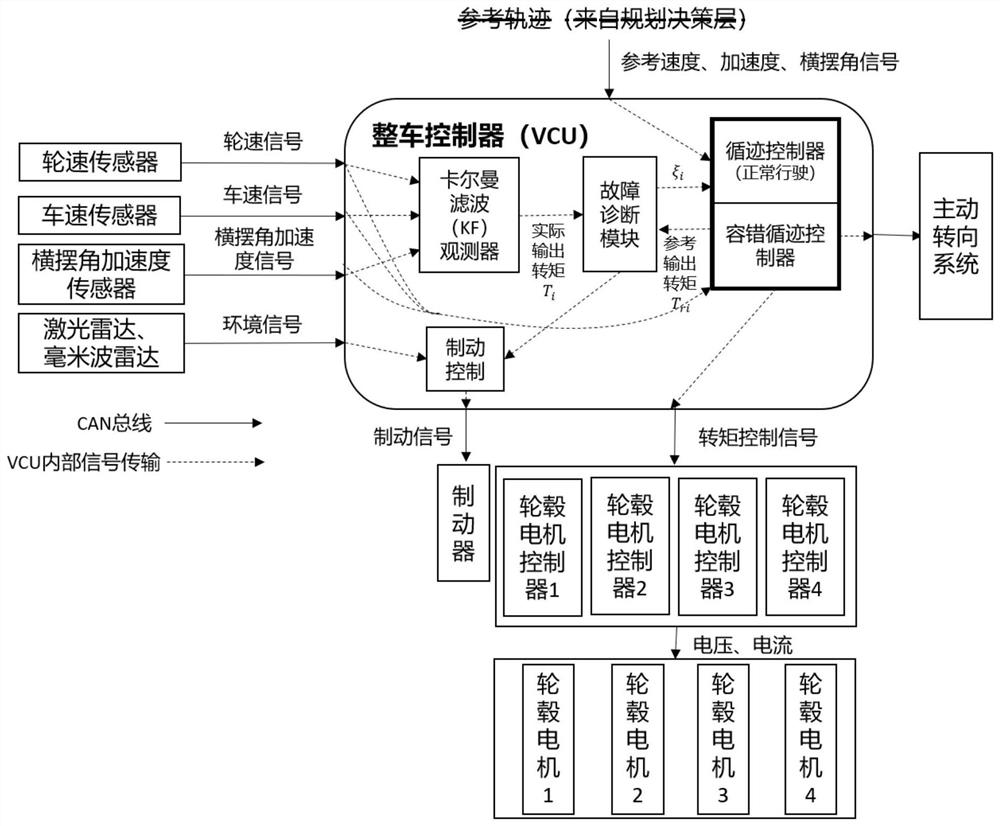
[0029] The basic structure diagram of the default four-wheel distributed electric drive self-driving vehicle is as follows: figure 1 . The structure of the distributed electric drive self-driving vehicle involved in the present invention mainly includes wheels 1, in-wheel motors 2, active steering system 3, power battery pack 4, DC / DC components, VCU7 (vehicle controller), etc., and the active steering system 3 includes Steering motor 8 and steering gear 9. The four in-wheel motors 2 are inside the four wheels 1 , and the in-wheel motors 2 have direct mechanical connections and support mechanisms 5 with the corresponding wheels 1 . There is a power battery pack 4 in the car, and its electric energy is converted into three-phase power by the motor controller 6 on the one hand to supply energy for each wheel hub motor 2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More