

Micro-decision-making method for self-driving vehicles based on reinforcement learning
A reinforcement learning and automatic driving technology, applied in neural learning methods, biological neural network models, control devices, etc., can solve the problem of difficult urban roads to show good decision-making performance, not well adapted to environmental dynamic changes, state space and Large behavior space, etc., to achieve the effect of strong universality and portability, easy deployment, and strong feasibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
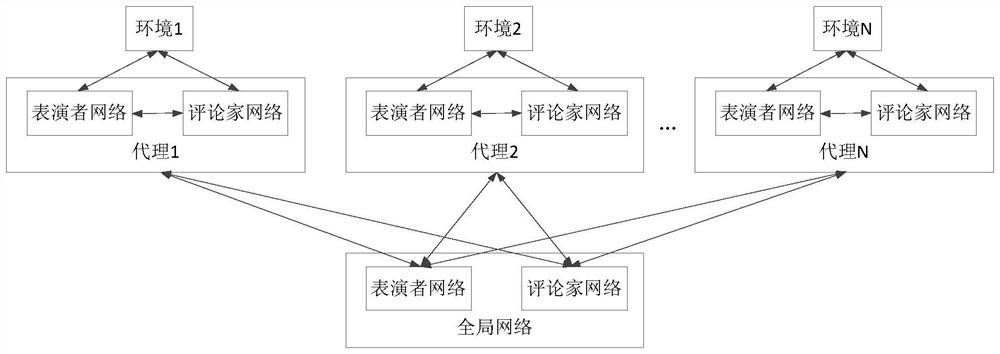
[0065] Such as Figure 1 to Figure 4 As shown, the self-driving vehicle micro-decision-making method includes the following steps:
[0066] Step 1, reinforcement learning modeling, modeling and representation of automatic driving decision-making scheme:
[0067] In step 1.1, the driving process of the vehicle is defined as a Markov decision process. The autonomous vehicle is regarded as an agent, and the driving environment of the vehicle is regarded as a reinforcement learning environment. The agent vehicle makes driving decisions and Driving behavior, adjust the driving decision based on the driving results, divide the driving time into multiple time slots, each agent vehicle makes a driving decision at the beginning of the time slot, and determine the driving behavior of each agent vehicle in the time slot;
[0068] Step 1.2, use...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More