Underground unmanned transport vehicle robot control method
A technology of unmanned driving and control method, which is applied in the direction of vehicle position/route/height control, transportation and packaging, control/adjustment system, etc., which can solve the problem of high vehicle cost and achieve the effect of cost reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below. Obviously, the described embodiments are part of the embodiments of the present invention, rather than All the embodiments; based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts all belong to the protection scope of the present invention.
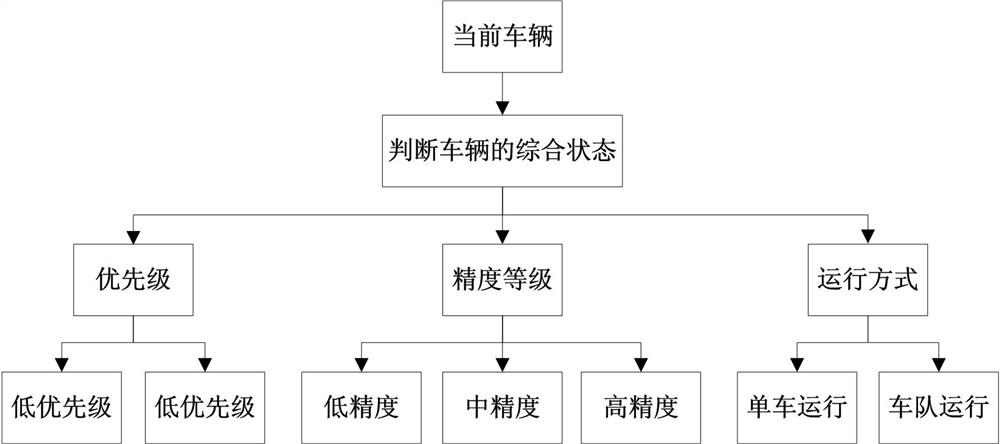
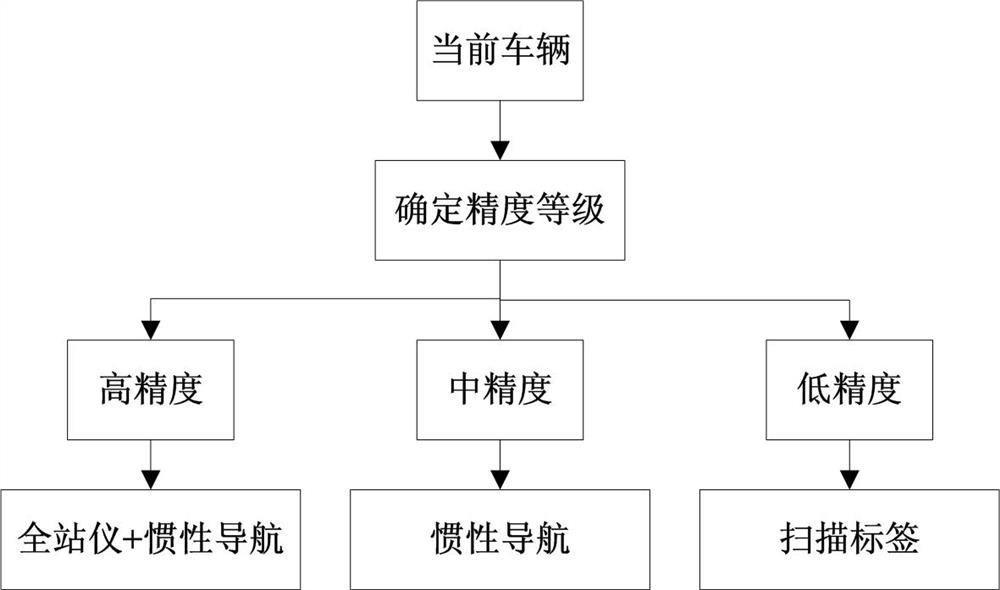
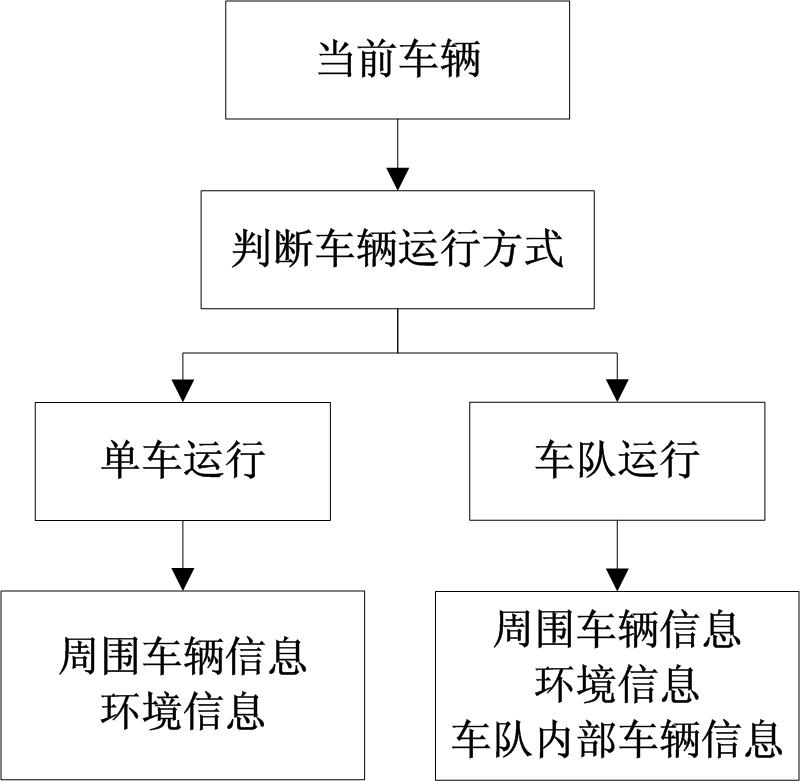
[0023] like figure 1 As shown, the present invention provides a control method for an underground unmanned transport vehicle robot, which judges the transport vehicle from three aspects: (1) the priority of the transport vehicle. According to the actual working status and work needs of the vehicle, the priority of the vehicle is divided into low priority and high priority. (2) The accuracy level of the transport...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More