

Driving lane judgment method based on perception of objects around vehicle
A technology for driving roads and vehicles, applied in the field of driving lane judgment based on the perception of objects around the vehicle, it can solve problems such as the inability to realize lane-level positioning, fail to meet safety requirements, and lack of robustness, and achieve great promotion value and judgment method simple, simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
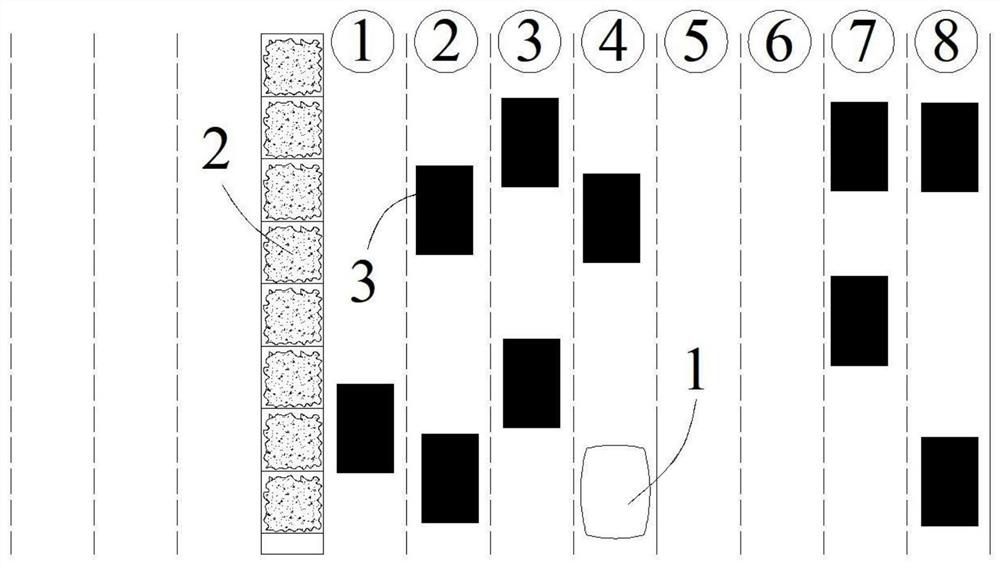
[0023] Embodiment 1: The vehicle 1 is running on a closed road, and the center of the road is separated by a central isolation belt, such as figure 1 Shown, the road of present embodiment is one-way eight lanes. The vehicle 1 has an on-board sensor. The on-board sensor in this embodiment is a millimeter-wave radar and a smart camera, which are used to sense information about objects on the left and right sides of the vehicle 1 .
[0024] The ADAS map or the car navigation map gives information on the number of lanes of the road the vehicle is driving on.
[0025] The control system recognizes the static object 2 on the left side of the vehicle 1 according to the on-board sensor. The static object 2 can be a central isolation belt, a guardrail or a signal sign. There is a central isolation belt in the middle of the road in this embodiment, so the vehicle 1 is identified by the sensor For the median on the left, the on-board sensor recognizes the positional relationship between...
Embodiment 2
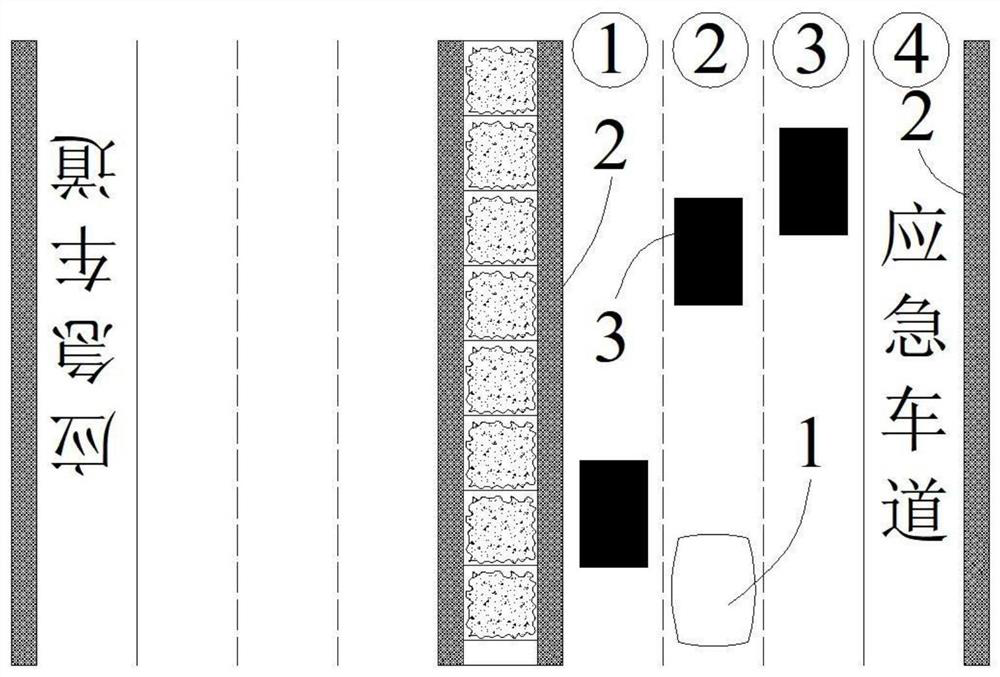
[0030] Embodiment 2: This vehicle 1 travels on domestic common highways, such as figure 2 As shown, each driving direction contains three driving lanes and one emergency lane, each driving direction is separated by isolation guardrails on both sides, and the center of the road is separated by a central isolation belt. The vehicle 1 has an on-board sensor. The on-board sensor in this embodiment is a millimeter-wave radar and a smart camera, which are used to sense information about objects on the left and right sides of the vehicle 1 .
[0031] The ADAS map or the car navigation map gives information on the number of lanes of the road on which the own vehicle 1 is traveling.
[0032] The control system recognizes the static object 2 on the left side of the vehicle 1 according to the on-board sensor. The static object 2 can be a central isolation belt, a guardrail or a signal sign. There is a guardrail on the left side of the road in this embodiment, so the sensor identifies th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More