Orchard local sparse mapping method and system based on binocular vision and RTK
A binocular vision, local sparse technology, applied in computer parts, character and pattern recognition, instruments, etc., can solve the problems of difficult operation technology, high labor cost, easy to be affected by light conditions, etc. Large, high labor cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
[0044] Such as Figure 1~4 As shown, it shows the specific implementation of the present invention, as shown in the figure, the specific embodiment of the system of the present invention is as follows:
[0045] A local sparse mapping system for orchards based on binocular vision and RTK, its implementation method includes:
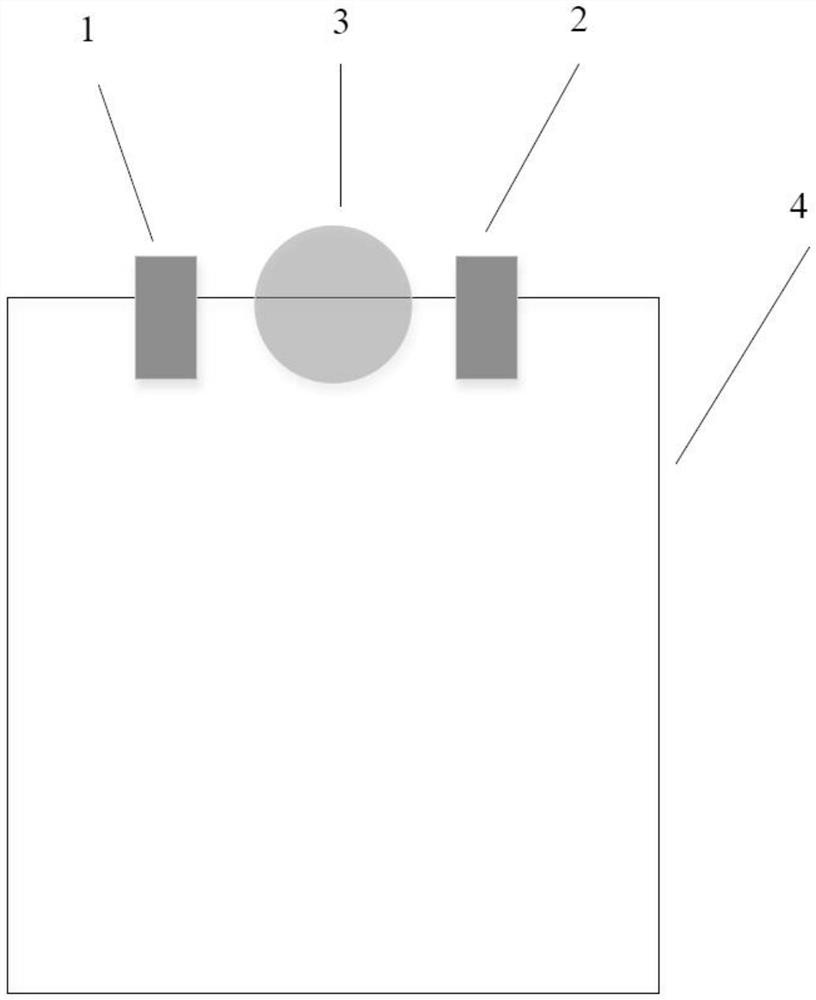
[0046] The system includes a binocular vision module and an RTK positioning module. The binocular vision module includes two left and right cameras, which are used to collect visual images of fruit trees in the orchard. The left and right visual images can be calculated to obtain the coordinates of the fruit trees; the RTK positioning module is used to obtain the latitude and longitude information of the location of the RTK module. The binocular vision module and RTK positioning module are installed on the work vehicle, and the left and right cameras of the binocular vision module are symmetrically installed on the left and right sides of the RTK antenna....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More