

Obstacle detection method, device, self-propelled robot and storage medium
A detection method and obstacle technology, which is applied in the direction of automatic detection of obstacles, machine parts, automatic control of traveling motion, etc., can solve problems such as poor user experience and accidental collision of obstacles, and improve the ability to detect obstacles. The effect of obstacle avoidance performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] In order to make the purpose, technical solutions and advantages of the embodiments of the present disclosure clearer, the technical solutions in the embodiments of the present disclosure will be clearly and completely described below in conjunction with the drawings in the embodiments of the present disclosure. Obviously, the described embodiments It is a part of the embodiments of the present disclosure, but not all of them. Based on the embodiments in the present disclosure, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present disclosure.
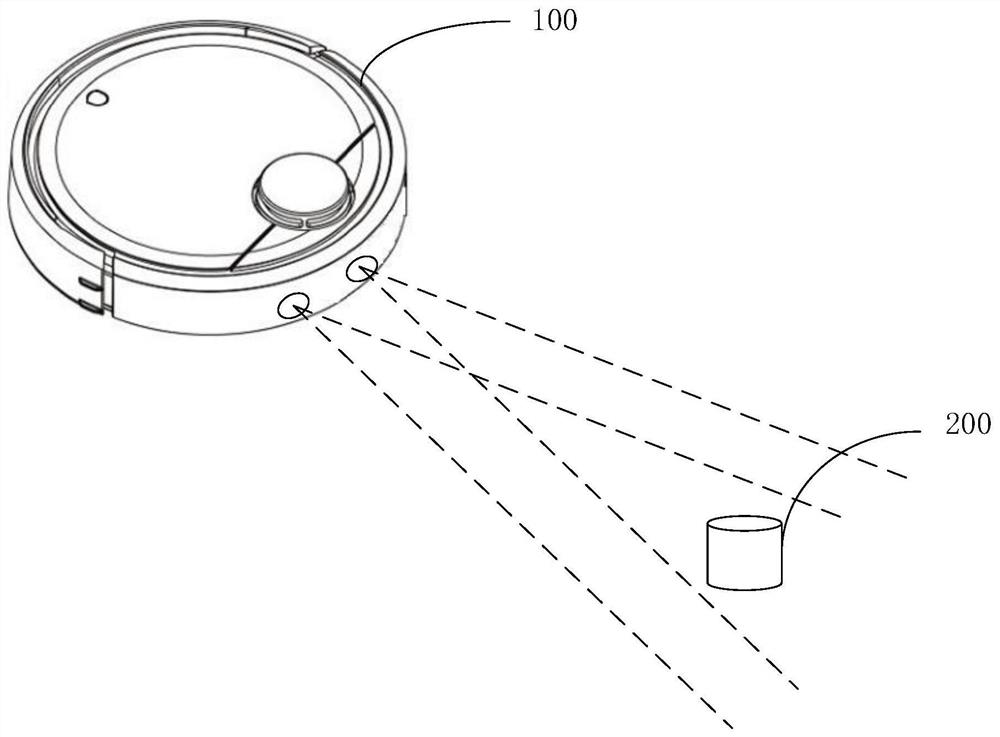
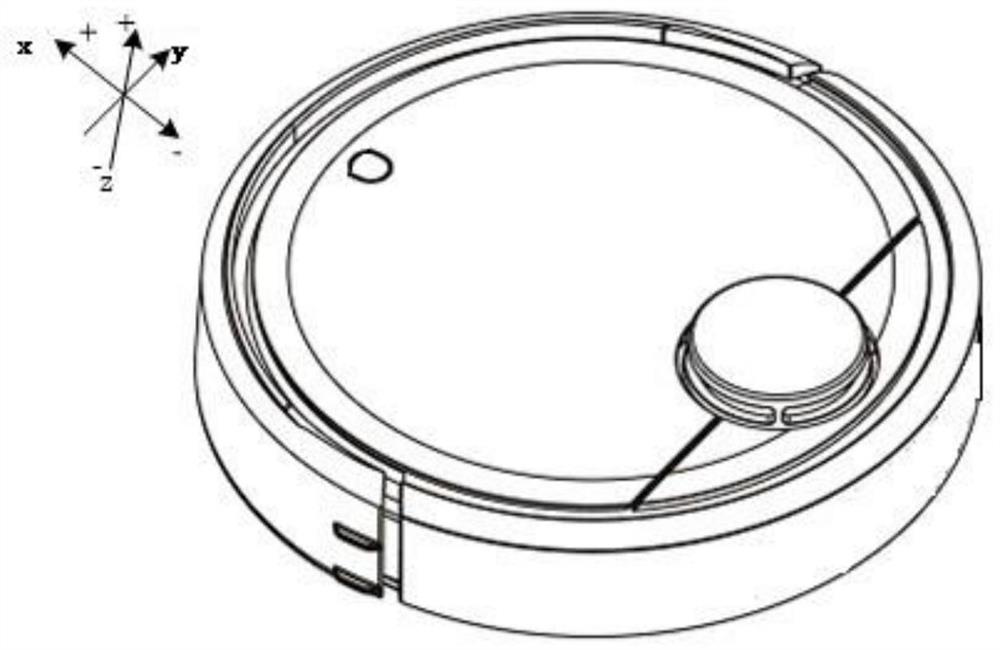
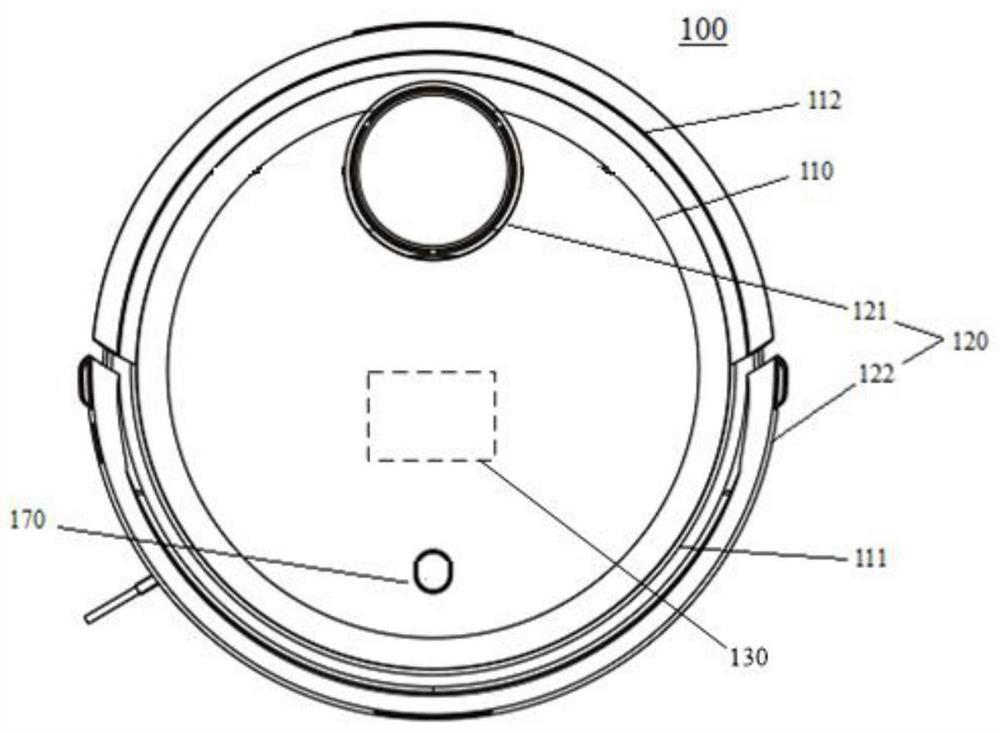
[0041]An embodiment of the present disclosure provides a possible application scenario, and the application scenario includes an automatic cleaning device 100, such as a self-propelled robot, a mopping robot, a vacuum cleaner, a weeder, and the like. In some embodiments. In this example, if figure 1 As shown, the household self-propelled r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More