

Field operation path planning method and device for unmanned tractor
A technology of unmanned driving and path planning, applied in the direction of mechanical equipment, combustion engines, internal combustion piston engines, etc., can solve the problems of less research on irregular plot operation planning, lack of versatility, etc., to ensure global optimality and The effect of local real-time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
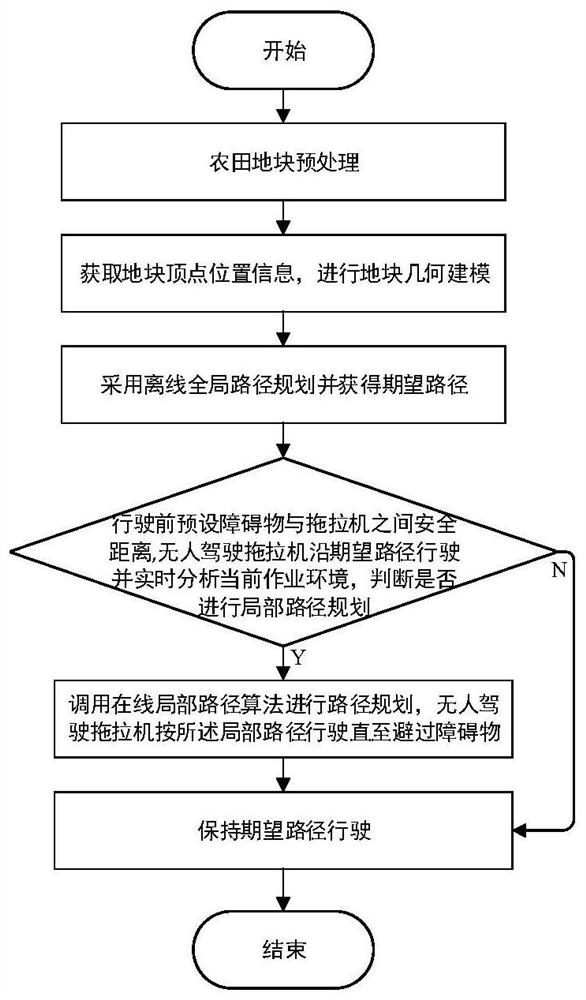
[0050] Such as figure 1 The overall flow chart shown in the figure takes an irregular farmland in China and a certain type of wheeled unmanned tractor with a minimum turning radius r of 5m as an example to construct a field operation path.
[0051] 1. Pretreatment of farmland plots
[0052] Select the operating range w of the operating tools as 12m. If there is a large obstacle such as a lake with a width greater than two operating widths inside the plot, it will have a great impact on the overall consumption and re-cultivation rate. At this time, it is necessary to follow the large obstacle The plot is divided into several sub-plots according to the boundary of the obje...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More