Lane line detection method based on deep learning
A lane line detection and deep learning technology, applied in instruments, biological neural network models, character and pattern recognition, etc., can solve problems such as the inability to accurately and quickly determine the lane lines, the detection effect is not ideal, the model is complex and speed, etc. Model complexity, avoiding the effects of large models and obvious features
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0021] Below, in conjunction with accompanying drawing and specific embodiment, the present invention is described further:
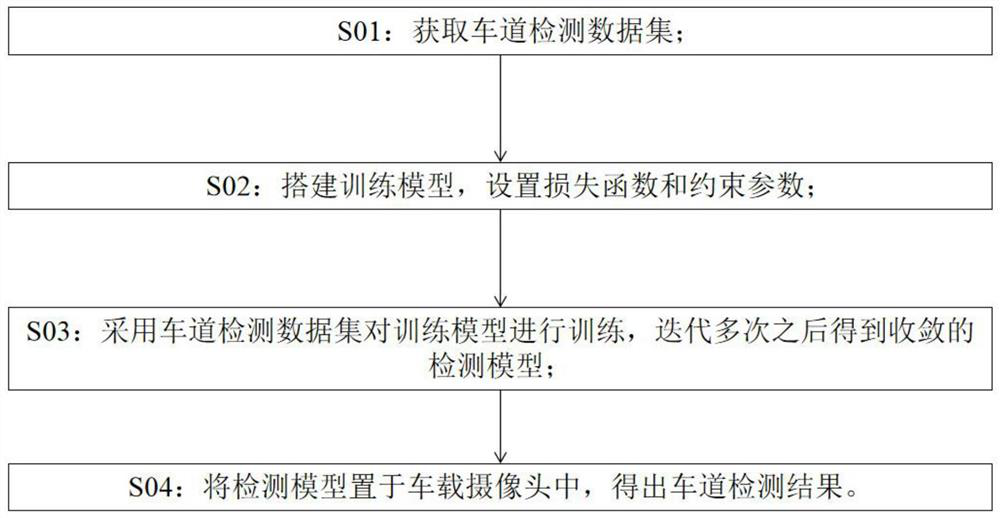
[0022] Please refer to the attached figure 1 , a lane line detection method based on deep learning, comprising the following steps:
[0023] S01: Obtain a lane detection data set, wherein the lane detection data set contains multiple lane detection data, each lane detection data corresponds to an image containing lanes, and the position and number of lane lines in the image are known and determined.
[0024] The lane detection data set includes normal detection data set and extreme detection data set. The lane lines of the images in the normal detection data set are clear, that is, the images routinely taken on the highway, the lighting conditions are good and the lane lines are relatively clear and unobstructed. This data set mainly Get lane line features in general.
[0025] The lane lines of the images in the extreme detection data set are occluded...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com