

Stepping motor driving method, stepping motor driving device and small mechanical arm
A technology of stepping motor and driving method, which is applied in the field of stepping motor driving device, small mechanical arm, and stepping motor driving method, can solve the problems of no position feedback, failure to meet requirements, inflexible control, etc., and achieve motion accuracy High, fast movement effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0023] The present invention will be described in detail below in conjunction with specific embodiments. In the present invention, unless otherwise clearly specified and limited, when terms such as "arranged at", "connected" and "connected" appear, these terms should be interpreted in a broad sense, for example, it can be a fixed connection or an optional connection. Detachable connection, or integral connection; it can also be mechanical connection; it can be directly connected, or connected through an intermediary, and it can be that two components are internally connected. Those skilled in the art can understand the specific meanings of the above terms in the present invention according to specific situations.
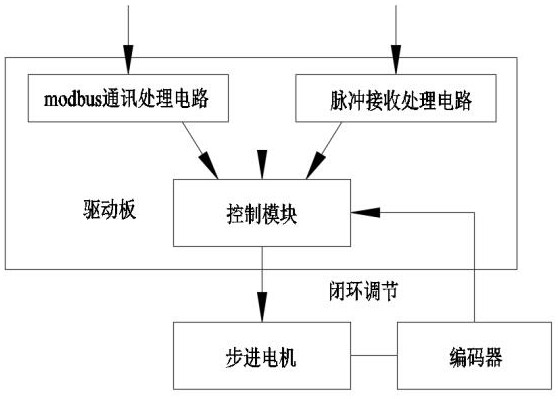
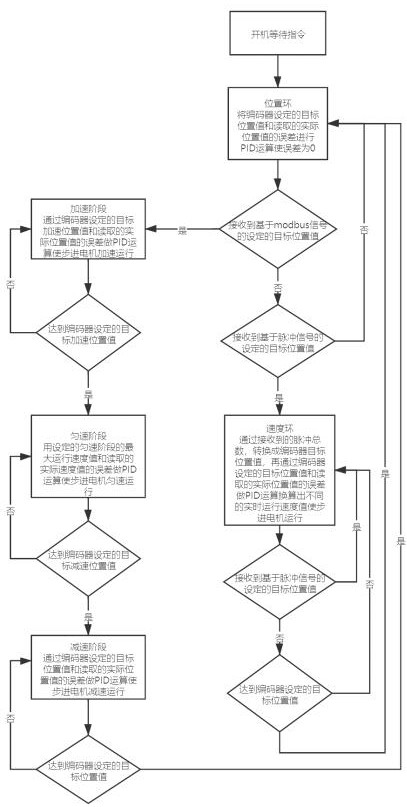
[0024] Stepper motor drive method The invention provides a stepper motor driving method, such as figure 1 As shown, the present invention provides a stepper motor driving method, which is used for the drive board of the DC two-phase hybrid stepper motor, the drive...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More