

Unmanned aerial vehicle landing method based on unmanned aerial vehicle automatic hangar
An unmanned aerial vehicle, automatic technology, applied in the field of unmanned aerial vehicles, can solve the problems of low efficiency and error-prone manual participation, and achieve the effect of saving space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
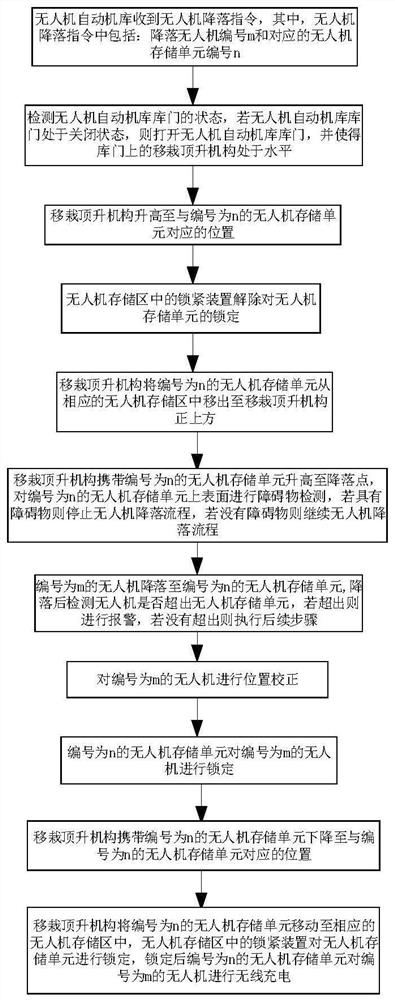
[0110] Please refer to figure 1 , Embodiment 1 of the present invention provides a UAV landing method based on the UAV automatic hangar, wherein several UAV storage areas are provided in the UAV automatic hangar, and each UAV storage area Corresponding to a UAV storage unit, each UAV storage area is provided with a locking device for fixing the UAV storage unit, and the method includes:
[0111] Step 1: The UAV automatic hangar receives the UAV landing instruction, wherein the UAV landing instruction includes: the landing UAV number m and the corresponding UAV storage unit number n;
[0112] Step 2: Detect the status of the automatic hangar door of the UAV. If the automatic hangar door of the UAV is closed, open the automatic hangar door of the UAV and make the transplanting jacking mechanism on the door at level;
[0113] Step 3: The transplanting jacking mechanism is raised to the position corresponding to the UAV storage unit numbered n;
[0114] Step 4: The locking devi...
Embodiment 2
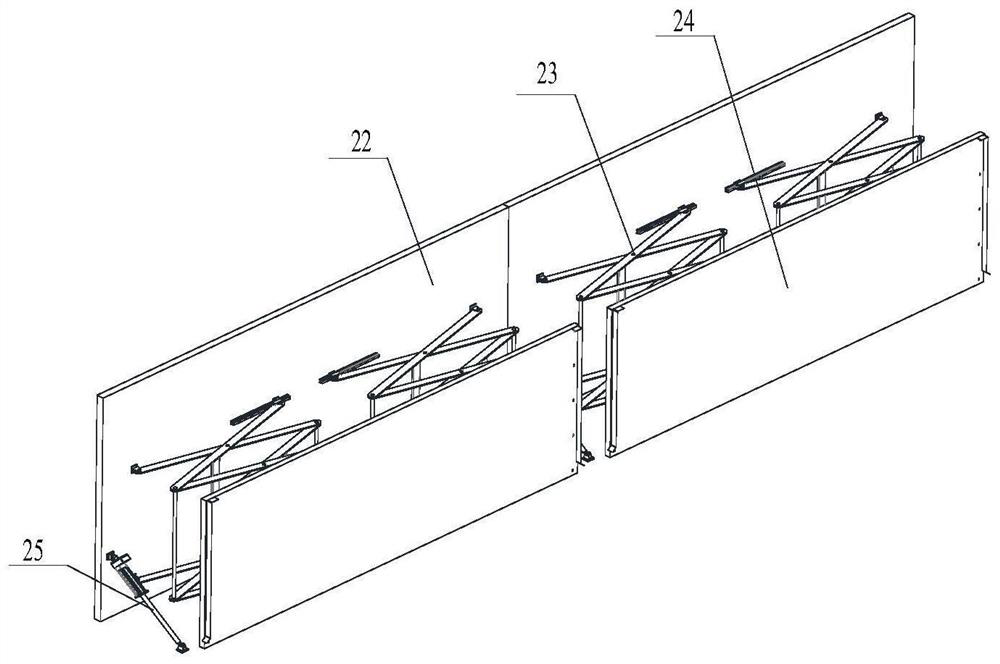
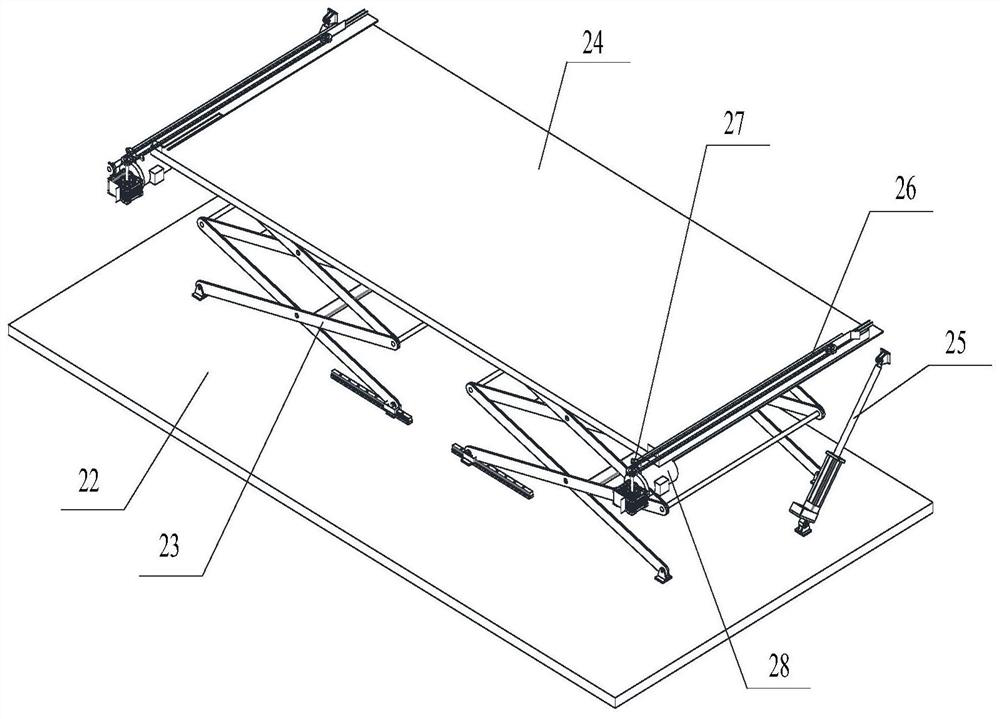
[0148] Such as figure 2 and image 3 As shown in the transplanting jacking mechanism, the inner wall of the door panel 22 is provided with a jacking mechanism 23, and the end of the jacking mechanism 23 away from the door panel 22 is connected to the lifting platform 24, and the lifting platform 24 is provided with a transfer mechanism; the lifting platform 24 is used to carry the unmanned aerial vehicle ; The jacking mechanism 23 is used to make the landing platform 24 close to and away from the door panel 22 ; The bottom edge of door panel 22 is used for being hinged with hangar side; Door panel 22 inwalls are also hinged telescopic device 25, and telescopic device 25 is used for being hinged with hangar side away from an end of door panel 22. The upper surface of the lifting platform 3-24 is parallel to the inner side wall of the door panel 22; the lifting platform 24 and the jacking mechanism 23 together form a scissor lifting platform.
Embodiment 3
[0150] Such as Figure 2 to Figure 7 The transplanting jacking mechanism shown, on the basis of the second embodiment, this embodiment optimizes the design of the transfer mechanism, specifically: the transfer mechanism includes a conveyor belt 26 capable of reciprocating movement, and the conveyor belt 26 is fixedly connected to the plectrum 27 ; also includes a first drive means 28 for driving the conveyor belt 26 . The first driving device 28 is a motor, and the conveyor belt 26 is a chain or a belt; the conveyor belt 26 rotates around the driving wheel 29 and the driven wheel 30, and the first driving device 28 drives the driving wheel 29 to rotate. Also comprise the 3rd slide rail 31 that is fixed on the landing platform 24, one end of the 3rd slide rail 31 stretches out to the outside of the landing platform 24, and when storehouse door is opened, this end extends toward storehouse interior direction. Also includes a mounting part 32 that is slidably connected on the th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More