Method for unmanned aerial vehicle autonomous counter-reconnaissance and enemy attack avoidance
A drone and anti-reconnaissance technology, which is applied in the direction of non-electric variable control, instruments, control/regulation systems, etc., can solve the problems of difficult drone control and poor generalization ability of escape schemes, and achieve low cost and increase Perceived ability, effect of efficient use of resources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] Below in conjunction with specific embodiment, further illustrate the present invention, should be understood that these embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention, after having read the present invention, those skilled in the art will understand various equivalent forms of the present invention All modifications fall within the scope defined by the appended claims of the present application.
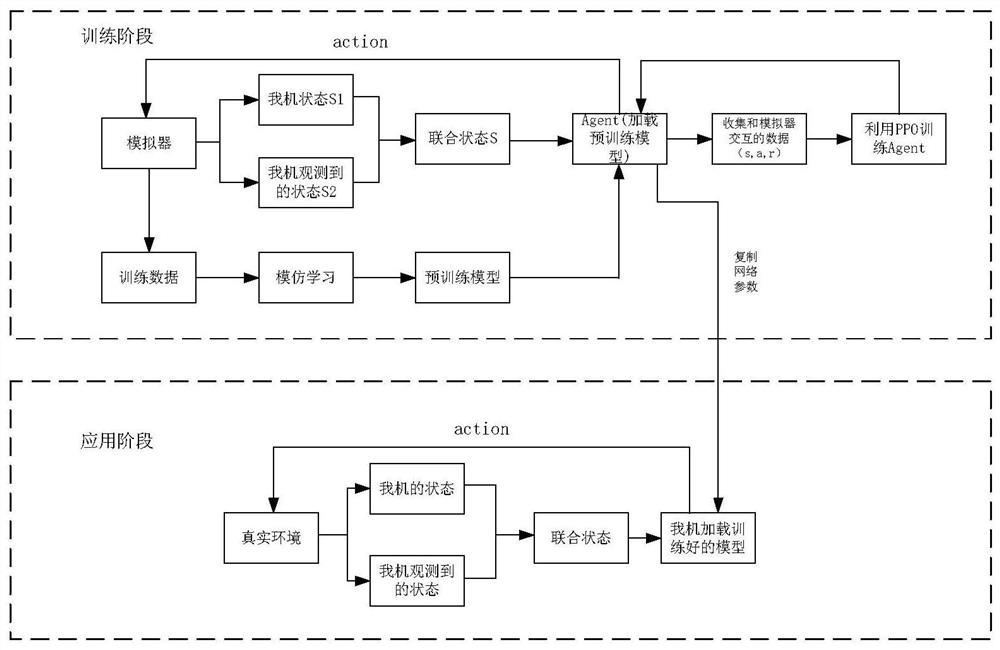
[0036] The method for UAV autonomous anti-reconnaissance and avoiding enemy attacks includes the following contents:
[0037] step one:
[0038]Build a simulator based on Unity3D: Build a simulator based on Unity3D. It is necessary to design a simulator with the following functions: (1) By controlling the pitch angle, roll angle, yaw angle, throttle stick position of the drone, control the flight without the aircraft. (2) The UAV can release the attack object to attack. (3) For different initia...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More