

A single-leg device with a dual parallel four-bar transmission mechanism and a six-wheel-legged robot
A transmission mechanism, double-parallel technology, applied in the direction of motor vehicles, transportation and packaging, etc., can solve the problems of non-unique motion, limited working space of robots, etc., achieve efficient complex terrain passing ability, increase motion range, and small storage effect of space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
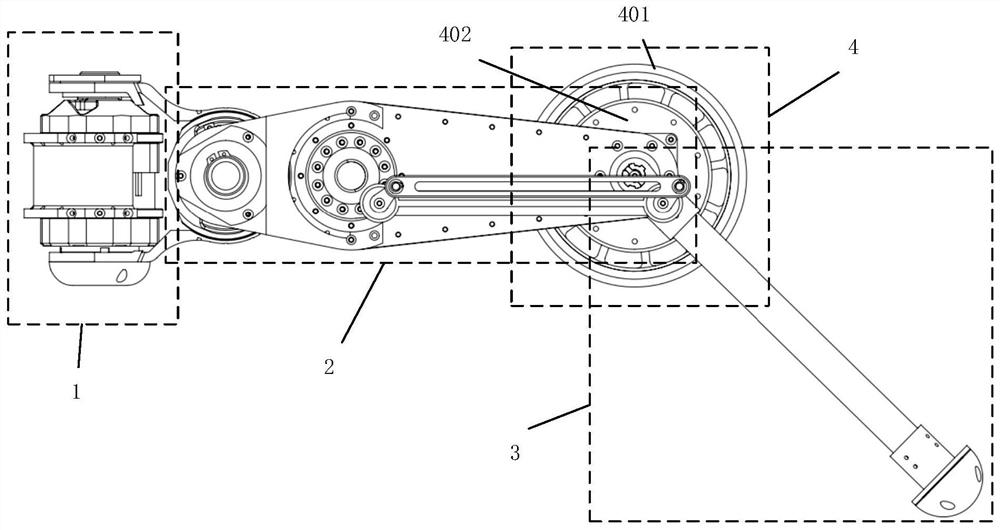
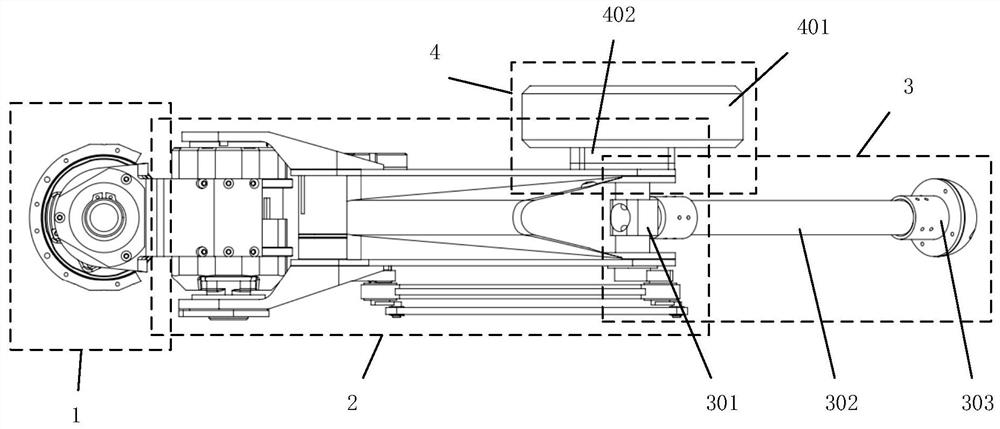
[0046] The single-leg device of the double parallel four-bar transmission mechanism of the present invention comprises a base part 1, a thigh part 2, and a lower leg part 3, such as figure 1 , figure 2 shown.
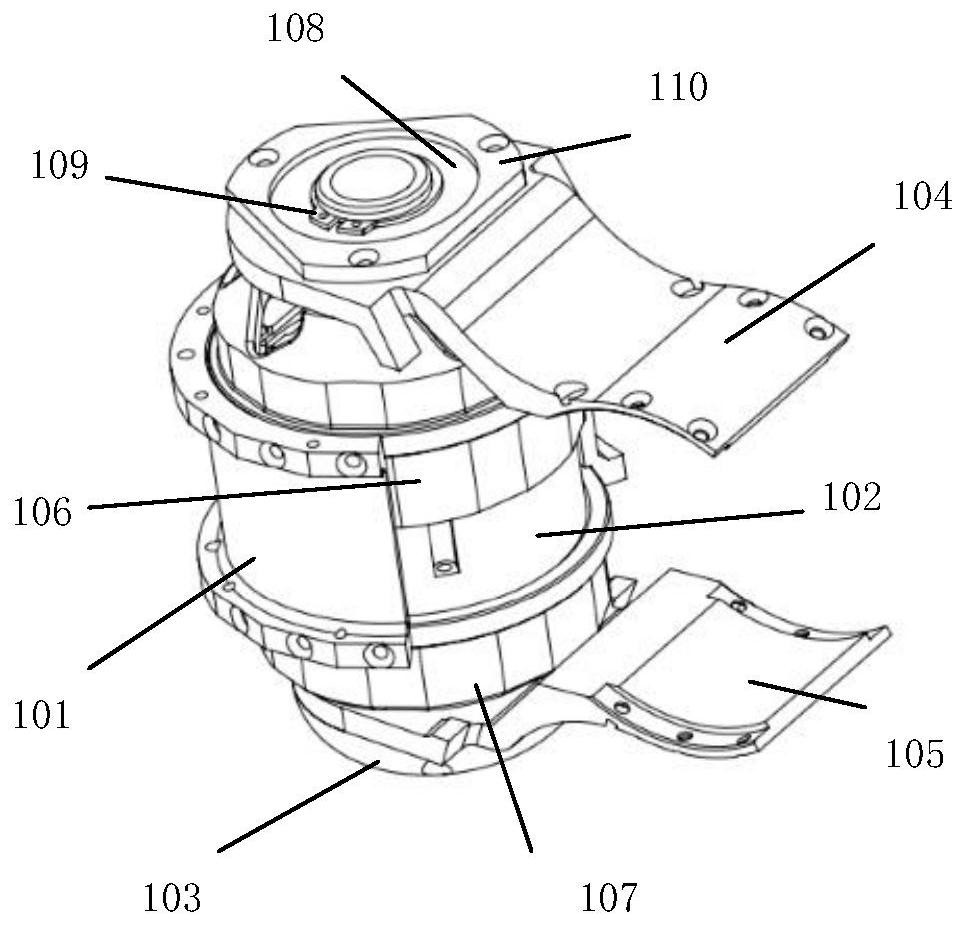
[0047] The base joint part 1 includes a fuselage connector 101, a waist joint drive motor 102, a base joint cushion 103, an upper base joint connector 104, a base joint connector lower 105, a waist joint drive motor kit upper 106, a waist joint drive The lower part of the motor kit 107 , the first bearing 108 , the retaining ring 109 for the first shaft and the first bearing pressure plate 110 . Such as image 3 , Figure 4 shown.
[0048]Wherein, the axis of the lumbar joint drive motor 102 is set perpendicular to the horizontal plane, and the upper and lower ends of the lumbar joint drive motor set 106 and the lower lumbar joint drive mot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More