

Frog hind leg gesture control device, jumping robot and gesture control method
A technology for regulating device and leg posture is applied in the field of bionic jumping robots, which can solve the problems of difficulty in accurately controlling the landing site, difficulty in adjusting the posture of the jumping robot, and inability to achieve jumping, etc., and achieves good obstacle-surmounting ability and movement ability, compact structure, With a strong load capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
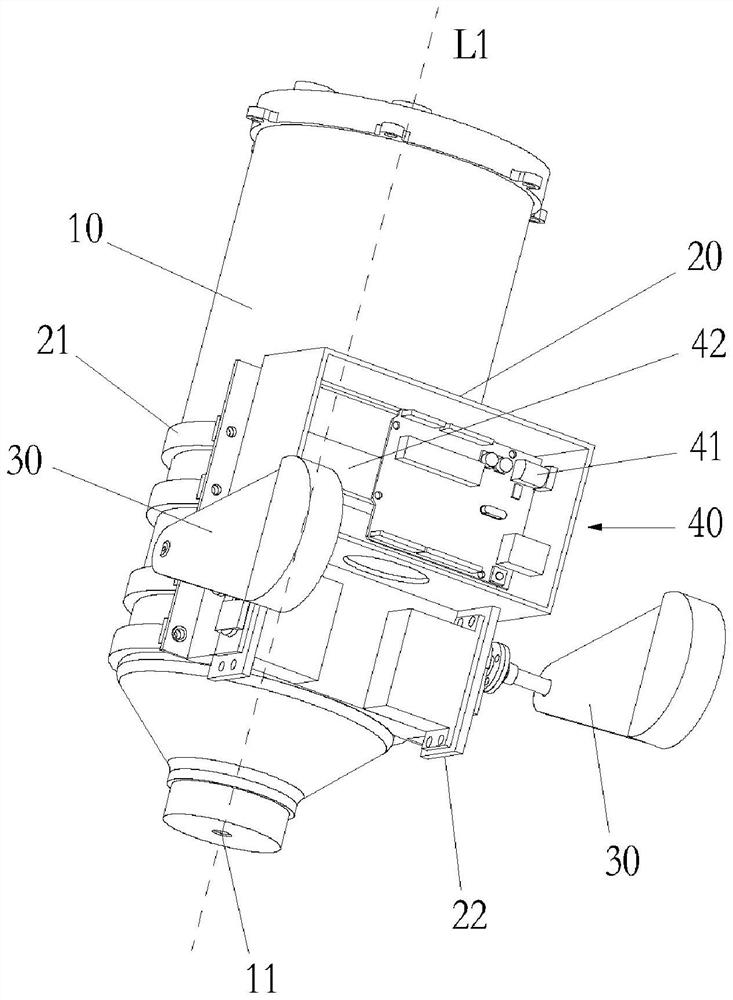
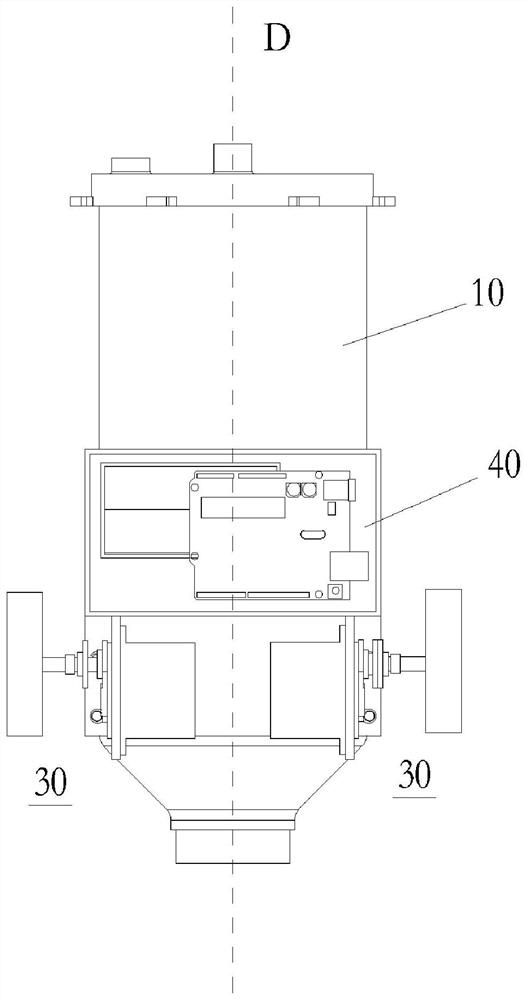
[0036] Such as Figure 1-4 As shown, the regulating device for imitating the posture of the frog's hind legs in the limited embodiment of the present invention includes: a jumping spray tank 10 , a mounting structure 20 , two rear leg structures 30 , an inertial sensor and a controller 40 .
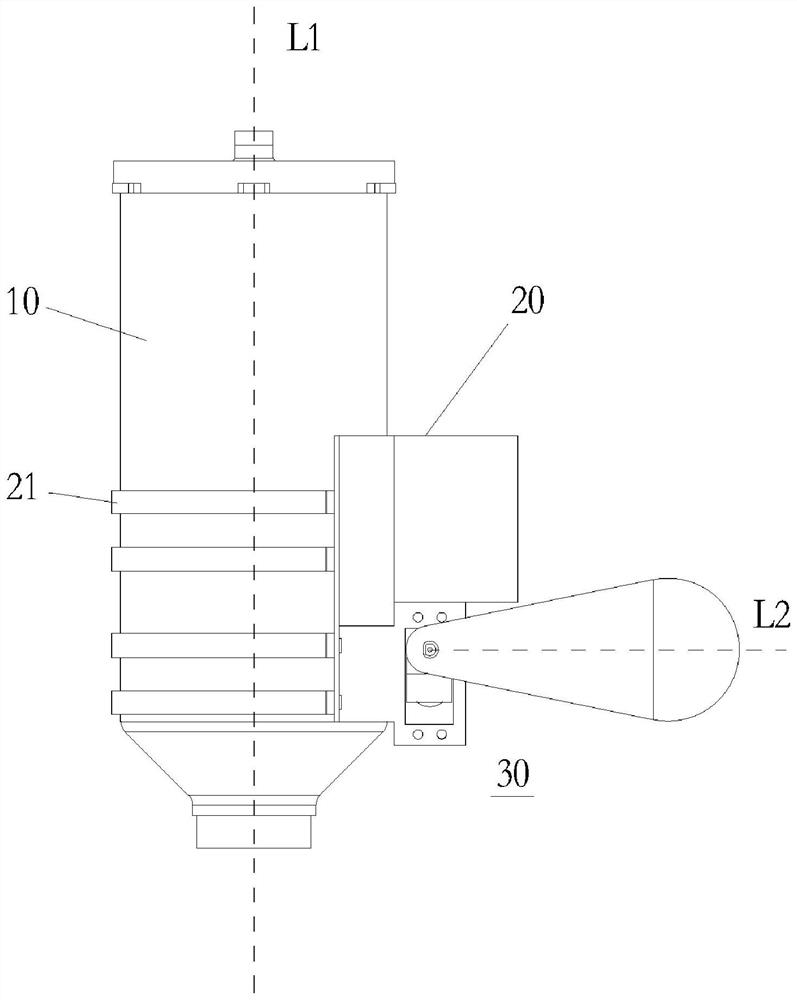
[0037] Wherein the jump spray tank 10 adopts figure 1 The cylindrical structure shown can add high-pressure propellant in it, and the lower end of the jumping spray tank 10 is the injection port 11. After the valve at the injection port 11 at the bottom of the jumping spray tank 10 is opened, the injection of the high-pressure propellant generates thrust. The triggerable device as a whole realizes jumping off the ground under the effect of the reaction propulsion force.
[0038] The mounting structure 20 is locked and connected to the jumping spray tank 10 through a plurality of fixing snap rings 21, for example figure 2 The layout of the four fixing snap rings 21 shown in , wherein th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More