

Direct method unsupervised monocular image scene depth estimation method
A technology of depth estimation and scene depth, which is applied in the fields of neural network, depth estimation, and computer vision, can solve problems such as the inability to eliminate external parameter variation errors, and achieve the effects of overcoming the strong dependence of radar sensors, wide application range, and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
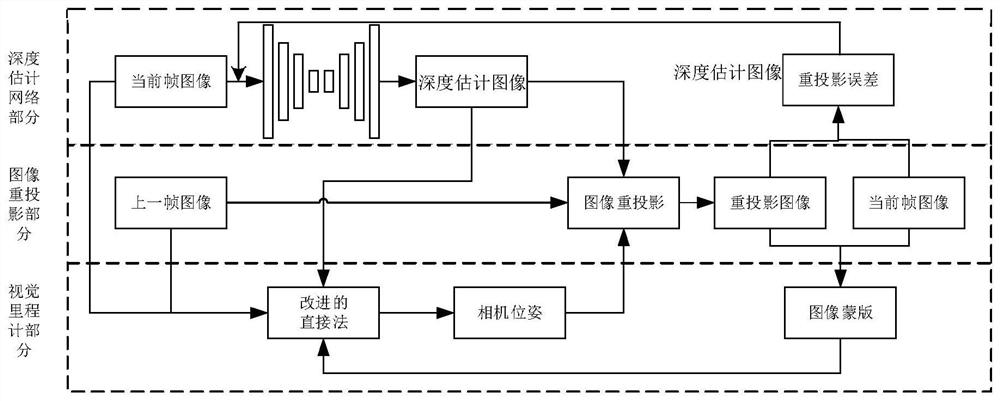
[0036] Such as figure 1 As shown, a direct method for unsupervised monocular image scene depth estimation method, including:
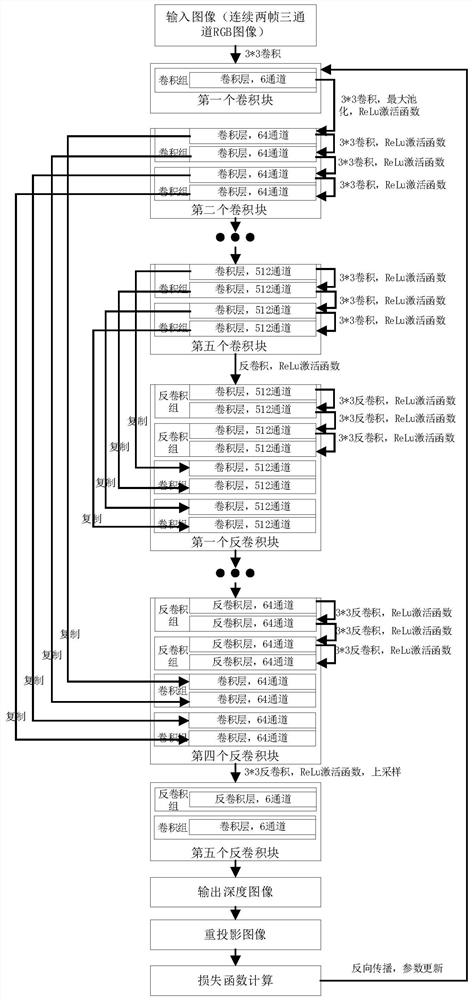
[0037] Step 1: The constructed depth estimation neural network is a fully convolutional U-shaped, including a convolutional part and a deconvolutional part. The depth estimation neural network takes the monocular continuous image as the input image, and uses the depth estimation neural network to output the depth estimation image.
[0038] Step 1 includes the following sub-steps:
[0039] Step 1.1: The convolution part uses the convolutional network in the Res-Net18 network structure as the main structure network. The convolution part is composed of several convolution blocks. The previous convolution block and the next convolution block are connected through the maximum pool operation. Each convolution block contains...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More