

Front vehicle lateral motion state real-time estimation method considering random measurement time lag
A lateral motion, random measurement technique, applied in instruments, control/regulation systems, simulators, etc., to solve problems such as divergence, limiting estimator accuracy, and estimator instability estimates
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
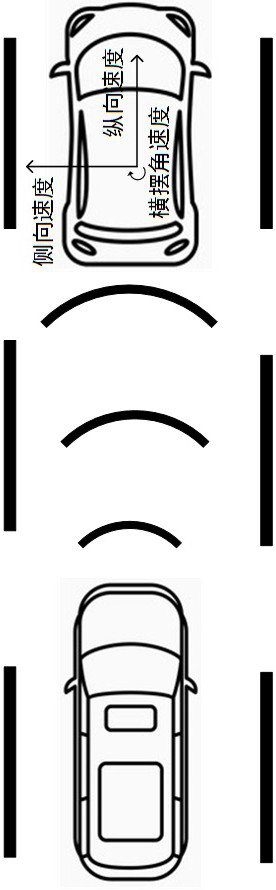
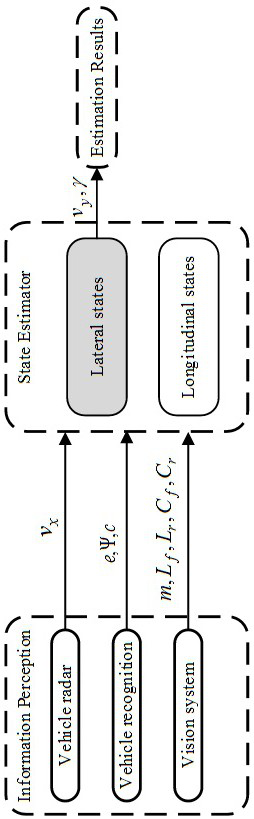
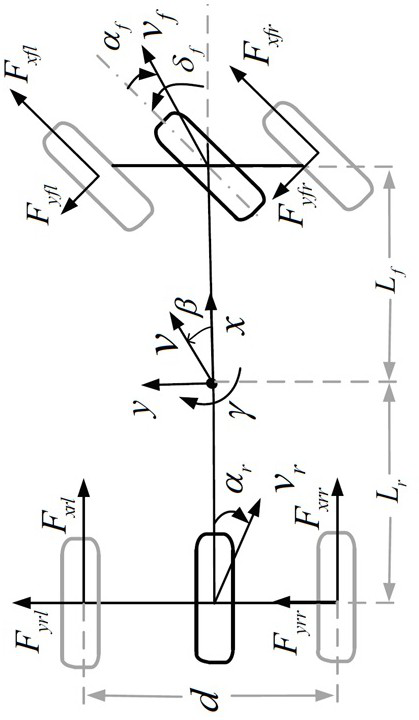
[0069] The invention relates to a real-time estimation method for the lateral motion state of a preceding vehicle in consideration of random measurement time lag, in particular to a rolling time-domain estimation method for the lateral motion state based on a multi-rate vehicle motion model. More specifically, with the continuous improvement of vehicle intelligence, it is necessary to obtain real-time acquisition of the movement status of surrounding vehicles, especially the vehicle in front, so as to provide necessary information support for the vehicle's decision-making, planning and control system.
[0070] In the car-following situation, the advanced driving assistance system or automatic driving system of the vehicle needs to obtain the lateral motion state of the vehicle in front. The present invention designs a method for the lateral motion of the vehicle in front under the condition of considering the measurement time lag. Real-time estimation method of motion state. I...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More