

Real-time Estimation Method of Front Vehicle's Lateral Motion State Considering Random Measurement Time Delay
A technology of lateral movement and random measurement, which is applied in the direction of instruments, control/regulation systems, simulators, etc., can solve problems such as slow convergence speed, unstable estimated values of estimators, and increased estimation errors, so as to improve model accuracy, The effect of high estimation accuracy and good robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
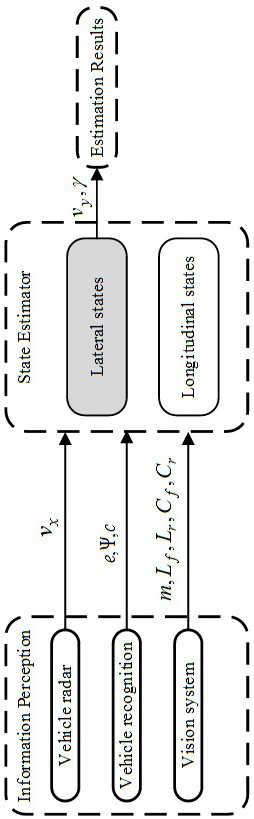
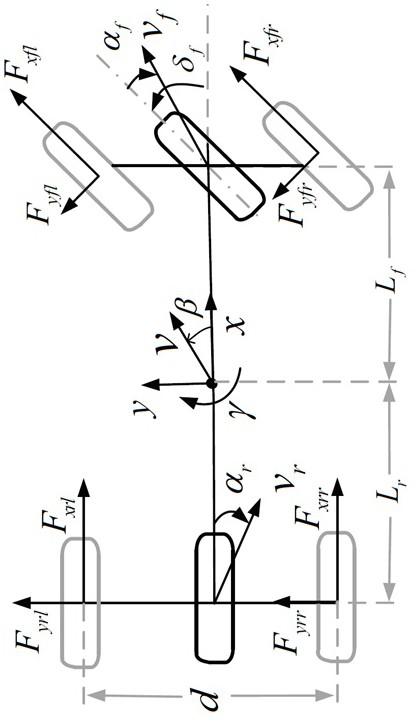
[0069] The invention relates to a real-time estimation method for the lateral motion state of a preceding vehicle in consideration of random measurement time lag, in particular to a rolling time-domain estimation method for the lateral motion state based on a multi-rate vehicle motion model. More specifically, with the continuous improvement of vehicle intelligence, it is necessary to obtain real-time acquisition of the movement status of surrounding vehicles, especially the vehicle in front, so as to provide necessary information support for the vehicle's decision-making, planning and control system.
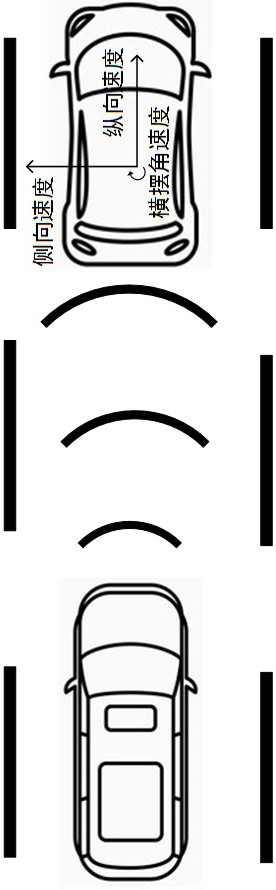
[0070] In the car-following situation, the advanced driving assistance system or automatic driving system of the vehicle needs to obtain the lateral motion state of the vehicle in front. The present invention designs a method for the lateral motion of the vehicle in front under the condition of considering the measurement time lag. Real-time estimation method of motion state. I...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More