

Control method and system for autonomous landing of vertical take-off and landing unmanned aerial vehicle mobile platform
A vertical take-off and landing, mobile platform technology, applied in control/adjustment system, non-electric variable control, three-dimensional position/course control, etc., can solve the problems of limited airborne sensors and computing capabilities, low payload characteristics, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0094] In order to enable those skilled in the art to better understand the technical solutions of the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings.
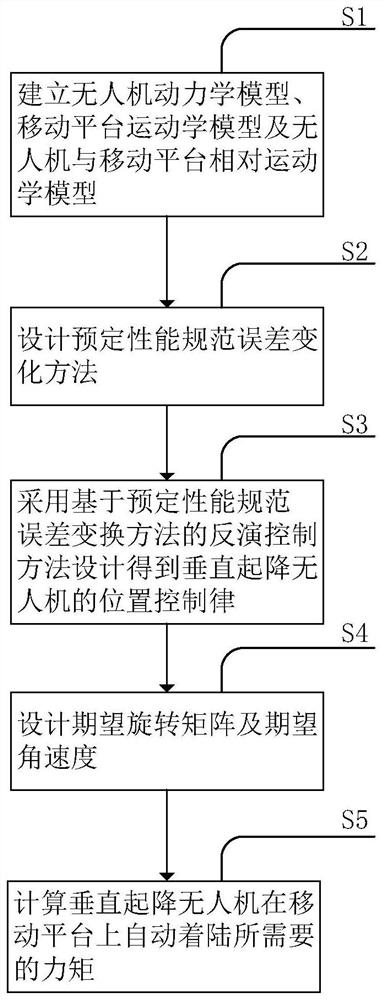
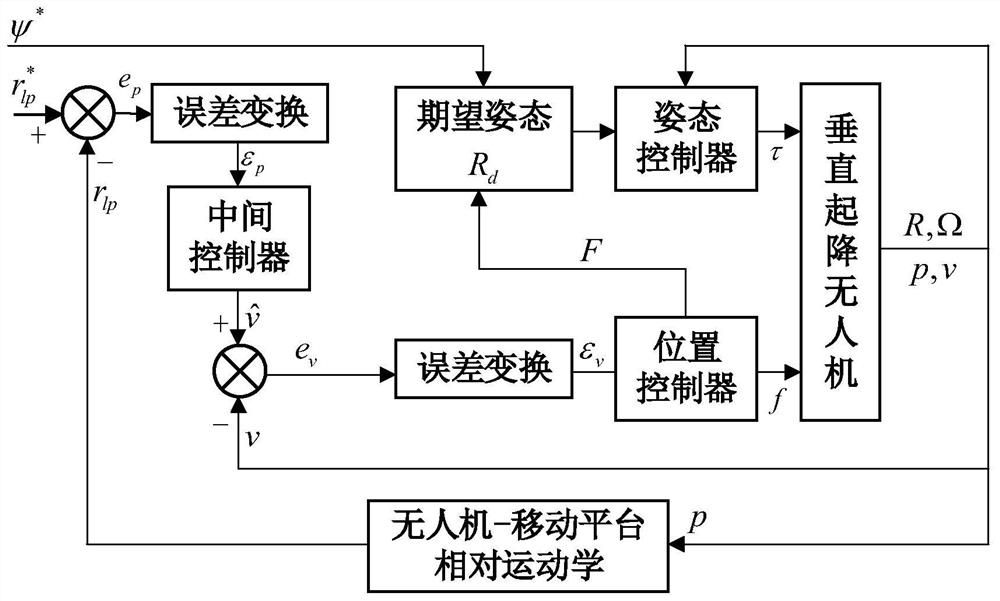
[0095] refer to figure 1 , figure 2 , figure 1 A flow chart of a control method for autonomous landing of a vertical take-off and landing drone on a mobile platform provided by the present invention, including the following steps:
[0096] S1: Establish the dynamics model of the vertical take-off and landing UAV, the kinematics model of the mobile platform, and the relative kinematics model of the vertical take-off and landing UAV and the mobile platform;
[0097] S2: Design a predetermined performance error transformation method;
[0098] S3: Using the inversion control method based on the predetermined performance error transformation method to design the position control law of the vertical take-off and landing UAV;
[0099] S4: Design th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More