

Robot stirring and grabbing combination method based on deep reinforcement learning
A technology of reinforcement learning and combined methods, applied in the direction of instruments, manipulators, program-controlled manipulators, etc., can solve problems such as insufficient grasping space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
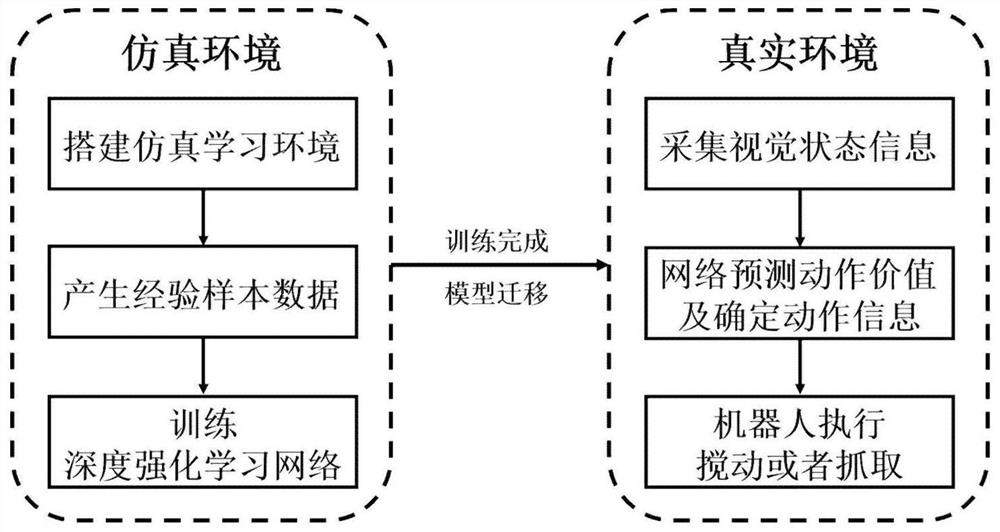
[0064] Such as figure 1 As shown, the robot agitation-grabbing combination method based on deep reinforcement learning provided by the invention comprises the following steps:
[0065] Step 1. Build a robot stirring-grasping execution platform in a real environment, and then build a robot stirring-grasping learning platform in a simulation environment, which is consistent with the robot stirring-grasping execution platform in the real environment;
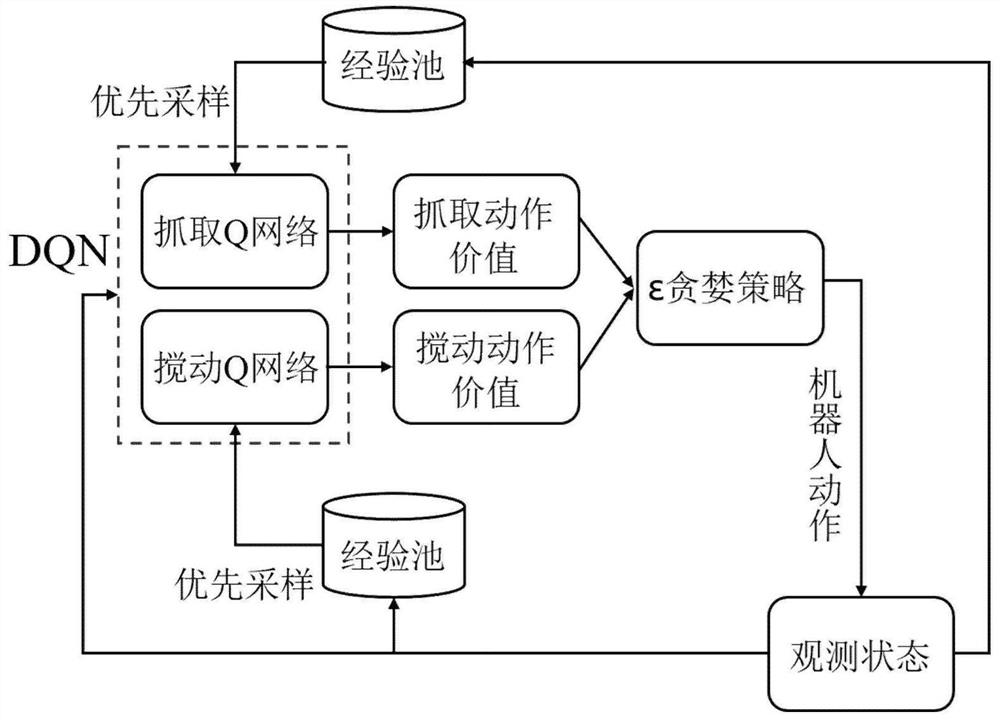
[0066] Step 2. Model the stirring-grabbing process of the robot as a Markov process, and construct the state space, action space and reward function;
[0067] Step 3. According to the Markov process established in step 2, construct a robot stirring-grasping learning framework based on deep reinforcement learning, and build a deep reinforcement learning network according to the state space, action ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More