

A positioning method and system based on image sensor and inertial sensor
A technology of image sensor and inertial sensor, which is applied in instruments, navigation and navigation through speed/acceleration measurement, can solve the problems of not suitable for robot positioning and enlargement, and achieve the effect of no cumulative error and overcoming drift
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The purpose of the present invention is to provide a positioning method and system based on an image sensor and an inertial sensor, so as to provide a high-precision positioning method that does not depend on external conditions and does not have accumulated errors.
[0048] In order to make the above objects, features and advantages of the present invention more clearly understood, the invention will be described in further detail below with reference to the accompanying drawings and specific embodiments.
[0049] For achieving the above object, the present invention provides the following scheme:
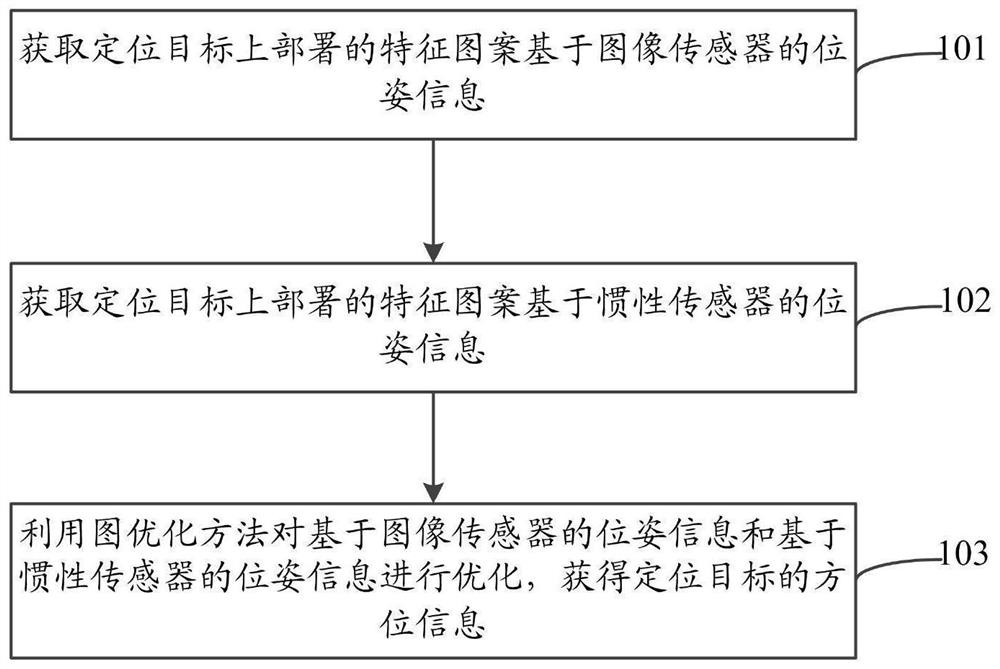
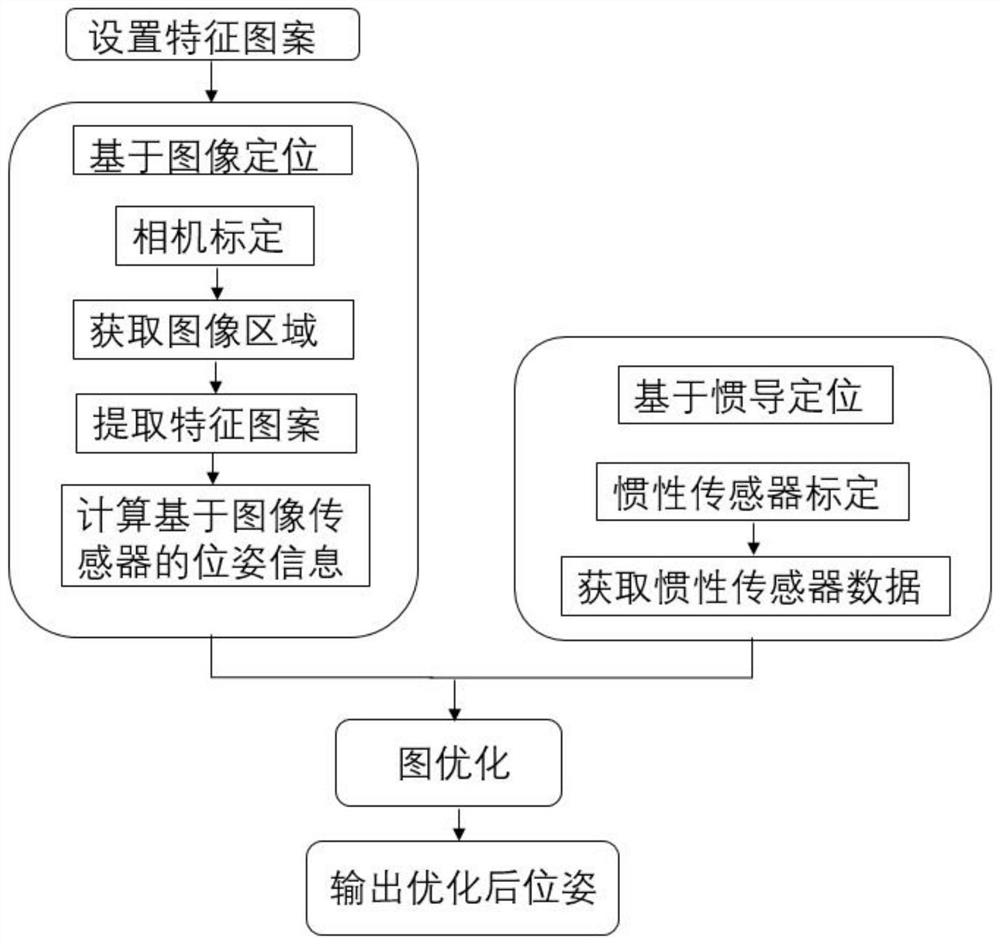
[0050] like figure 1 and 2 As shown, the present invention provides a positioning method based on an image sensor and an inertial sensor, and the positioning method includes the following steps:
[0051] Step 101: Obtain the pose information of the feature pattern deployed on the positioning target based on the image sensor.
[0052] In step 101, obtaining the characteri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More