

Dynamic geofence planning method for unmanned aerial vehicle based on airspace gridding
A geo-fencing and UAV technology, applied in flight plan management, aircraft traffic control, computer parts, etc., can solve the problems of low-altitude airspace resource shortage and low utilization rate.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0074] The present invention will be further described below in conjunction with the accompanying drawings.
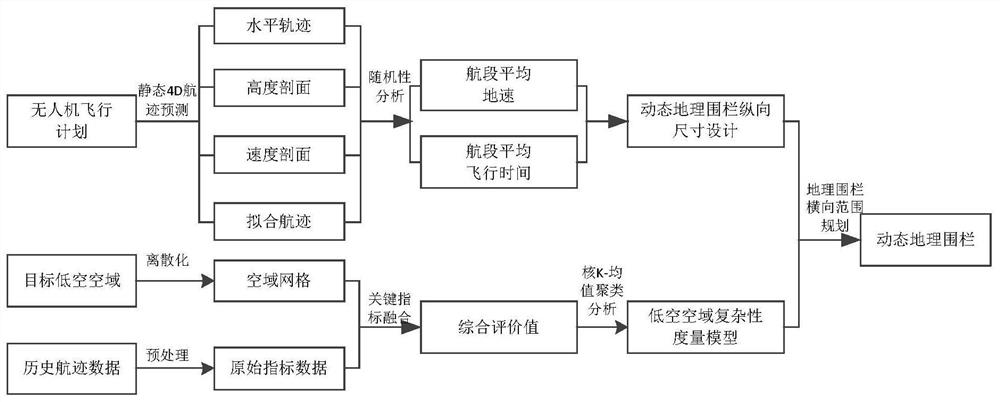
[0075] figure 1 It is a flowchart of the present invention, which may specifically include the following steps:
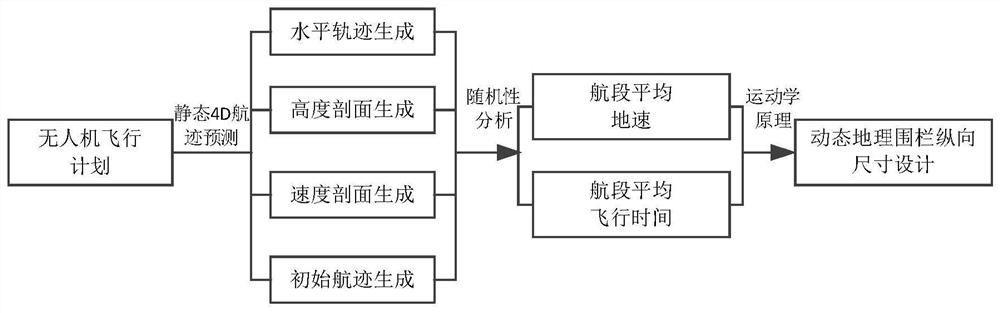
[0076] S1. Considering the randomness of the actual trajectory of the UAV, and predicting the flexible trajectory of the UAV flight plan;
[0077] For the target flight plan, firstly, the initial static 4D trajectory model of the UAV is established in combination with the performance parameters of the UAV, and then the trajectory randomness characteristics of the UAV in actual flight are analyzed, and the UAV is analyzed according to the trajectory randomness characteristics. The initial 4D track model is improved, and finally a flexible 4D track prediction model is generated.
[0078] The initial static 4D track prediction model of the UAV is specifically: 4D track refers to the accurate description of the aircraft flight track based on the four-dimensio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More