

Linear reciprocating type multi-RGV deadlock avoidance and conflict real-time control method and system, medium and terminal
A real-time control system and deadlock avoidance technology, applied in control/regulation systems, vehicle position/route/altitude control, non-electric variable control, etc. problem, to achieve the effect of strong practicability, high real-time performance, and guaranteed operation efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
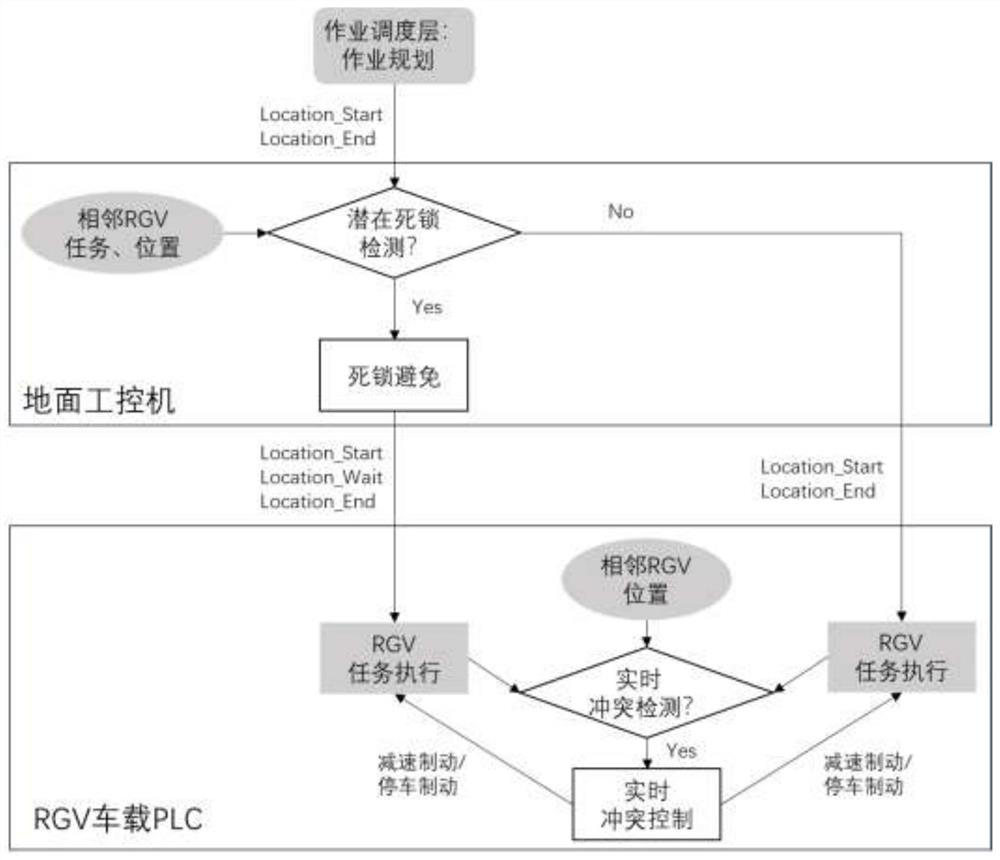
[0076] Such as image 3 Shown is the process of potential deadlock detection and deadlock avoidance performed by the ground industrial computer. It can be seen from the figure that the path given by the job scheduling layer to the RGV_control as the target RGV is: Path=(Location_Start, Location_End), where Location_Start and Location_End are the starting point and the ending point respectively. The RGV_neighbor adjacent to RGV_control is regarded as an adjacent RGV, and its execution path is Path_existing=(Location_Now,Location_Next), and the forward direction of RGV_control is negative, the forward direction of RGV_neighbour is positive, and the length of the safety distance is Distance_safety. It can be seen that RGV_control and RGV_neighbor are facing each other, and the paths of Path and Path_existing have no intersection, but the distance between the endpoints Location_End and Location_Next is smaller than the safety distance Distance_safety, so there is a potential deadl...
Embodiment 2
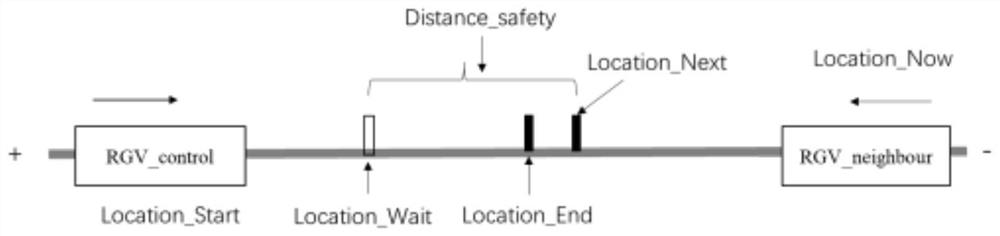
[0078] Such as Figure 4Shown is the process of conflict detection and conflict control of RGV vehicle-mounted PLC. It can be seen from the figure that the current position of RGV_control is Location_Start, the current position of its adjacent RGV_neighbor is Location_Now, and the length of the safety distance is Distance_safety. The current speed of RGV_control is v, the maximum acceleration value is a, and its braking distance is Distance_braking=v2 / (2×a). It can be seen from the figure that abs(Location_Start-Location)=Distance_safety, therefore, RGV_control executes the deceleration and braking command.
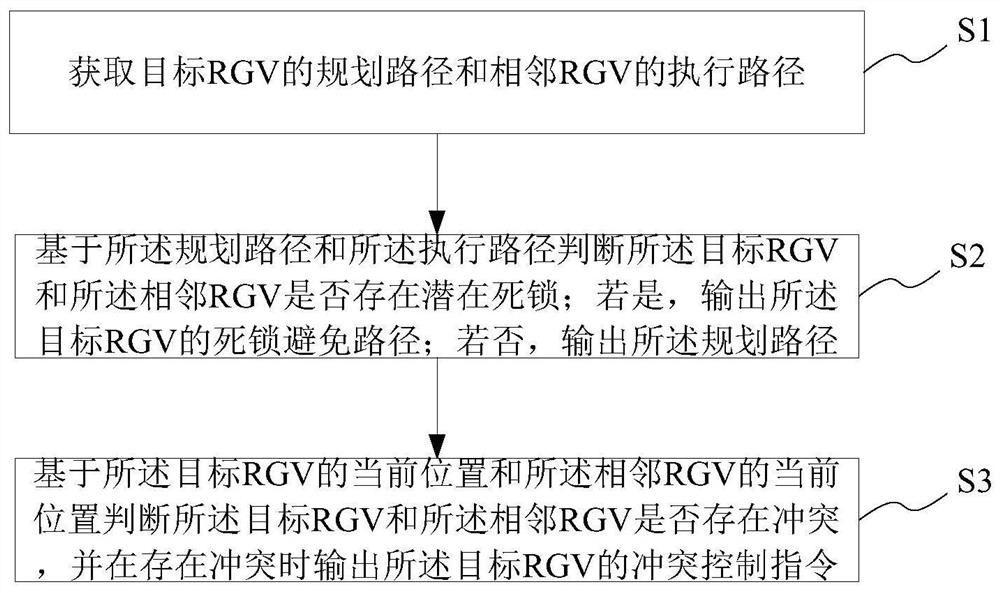
[0079] Such as Figure 5 As shown, in one embodiment, the linear reciprocating multi-RGV deadlock avoidance and conflict real-time control system of the present invention includes an acquisition module 51 , a deadlock processing module 52 and a conflict processing module 53 .
[0080] The obtaining module 51 is used to obtain the planned path of the target RGV and the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More