

Unmanned aerial vehicle cooperative flight path planning method based on Bayesian and evolutionary algorithms
An evolutionary algorithm and trajectory planning technology, applied in the field of information processing, can solve problems such as reduced efficiency of trajectory optimization, large breakpoints of trajectory, and influence on trajectory optimization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0075]The present invention will be further described in detail below in conjunction with the drawings and specific embodiments.
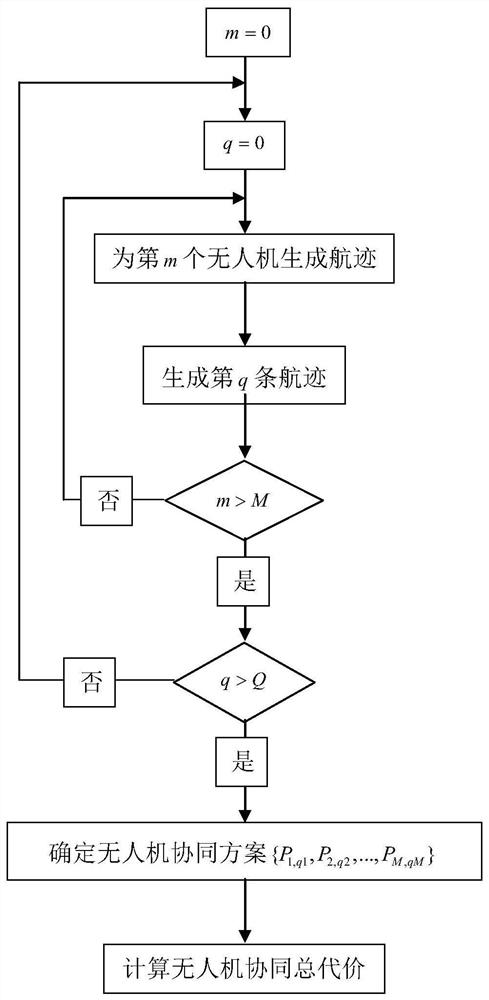
[0076]Referencefigure 1 withfigure 2 , A moving target detection method based on deep fully convolutional neural network, including the following steps:
[0077]Step 1: Grid division of the drone's navigation space:
[0078]The modeling space of UAV navigation is a three-dimensional space with limited length, width and height. In order to simplify the problem model of UAV trajectory planning, each spatial dimension is divided into grids at equal intervals according to the predetermined spatial distance, and finally a Groups of grid intersections are evenly distributed in the three-dimensional space. These grid intersections are called the UAV's track nodes. The UAV's track is an ordered set of nodes composed of these nodes. Except for the first and last nodes in a trajectory, the remaining nodes can be connected to multiple neighboring nodes around it to form dif...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More