Robot Monte Carlo positioning method fusing magnetic field information
A positioning method and robot technology, applied in the direction of the size/direction of the magnetic field, electromagnetic wave re-radiation, instruments, etc., can solve problems such as easy failure, achieve high positioning success rate, fast convergence speed, improve positioning speed and success rate Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] Embodiments of the present invention are described in detail below, and the embodiments are exemplary and intended to explain the present invention, but should not be construed as limiting the present invention.
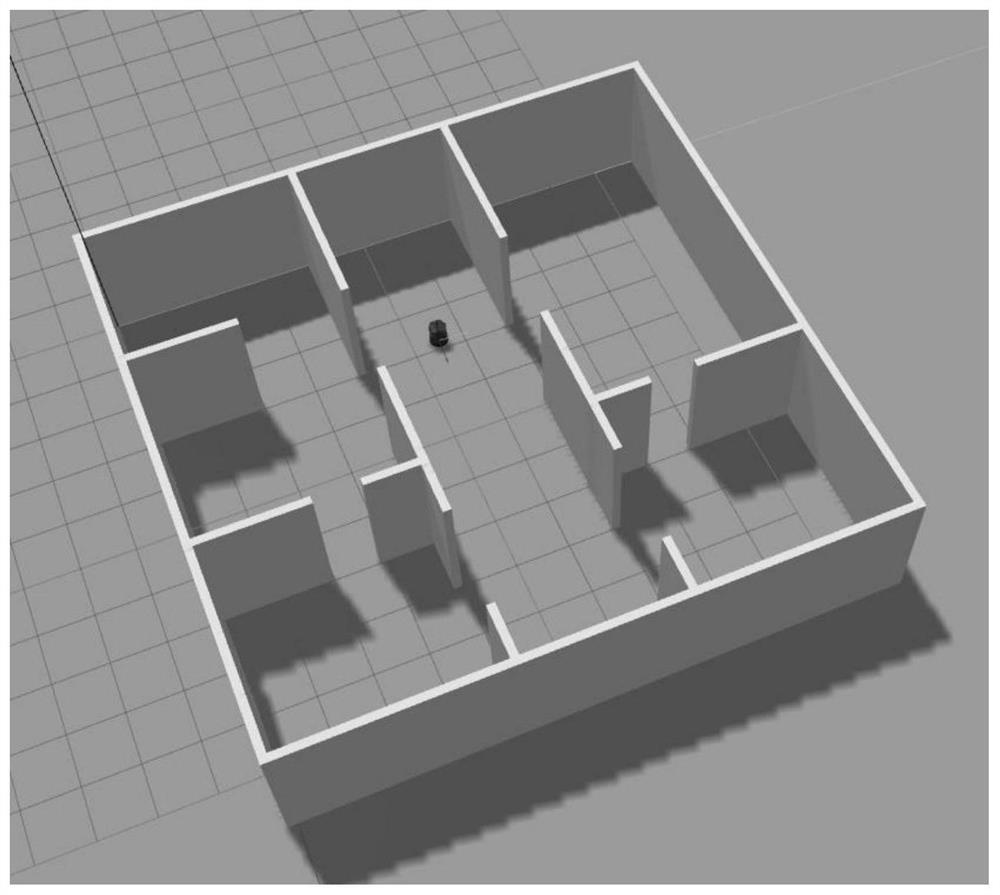
[0037] To prepare, construct a virtual environment with similar spatial characteristics in Gazebo.
[0038] Step 1: In gazebo, use the turtlebot robot equipped with a single-line lidar to construct a two-dimensional occupancy grid map through the laser SLAM algorithm. Simultaneously simulate the collection of magnetic features. The present invention uses the total magnetic strength and the vertical component of the magnetic field in the building actually collected by the fluxgate sensor. The simulated robot samples uniformly according to the square grid in the virtual environment of 11m×11m, and the grid spacing is 1.1 meters.
[0039] Step 2: The magnetic field features collected in step 1 are expanded into a global magnetic feature map through a spatial int...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com