

Three-connecting-rod type marine self-grabbing and releasing mechanical arm device capable of actively controlling constant tension
A technology of active control and constant tension, applied in the direction of program control manipulator, manipulator, claw arm, etc., can solve the problems of inability to work safely and the work efficiency of marine manipulators, and achieve the effect of improving work efficiency and
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention is described in detail below in conjunction with accompanying drawing:
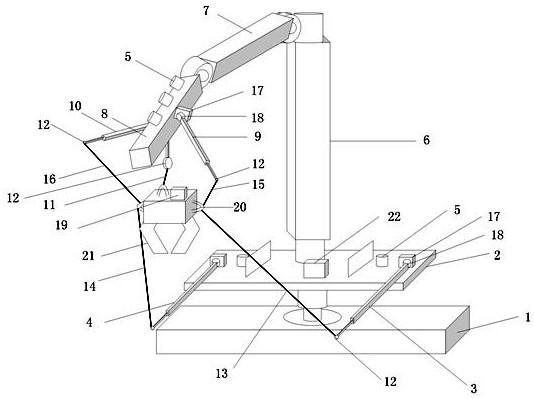
[0033] like figure 1 As shown, a three-link marine self-pick and place mechanical arm device with active control of constant tension mainly includes a base 1, a balance platform 2, a left balance arm 3, a right balance arm 4, a tension sensor 5, a connecting rod 6, Connecting rod 2 7, connecting rod 3 8, left auxiliary balance arm 9, right auxiliary balance arm 10, main sling 11, guide pulley 12, left balance cable 13, right balance cable 14, left auxiliary balance cable 15, right auxiliary balance Cable 16, fixing part 17, bearing 18, vision sensor 19, suspension ring 20, grabbing hook 21, PLC control box 22. The left balance arm 3 and the right balance arm 4 link to each other with the suspension ring 20 on the grapple 21 with the left balance cable 13 and the right balance cable 14 respectively. Left auxiliary balance arm 9 and right auxiliary balance arm 10 link to each ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More