

Wheel walking type robot foot end mechanism suitable for all-terrain road conditions
A robot, all-terrain technology, applied in the field of robotics, can solve the problem of slow walking speed of a footed robot, and achieve the effects of simple structure, strong resistance to lateral force, and good reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
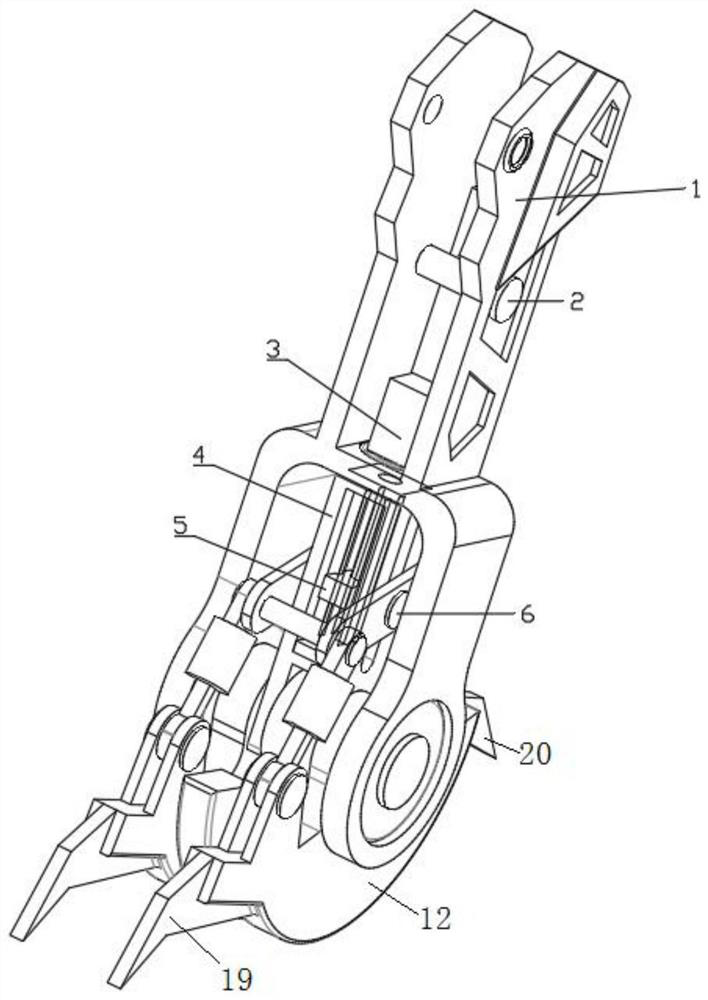
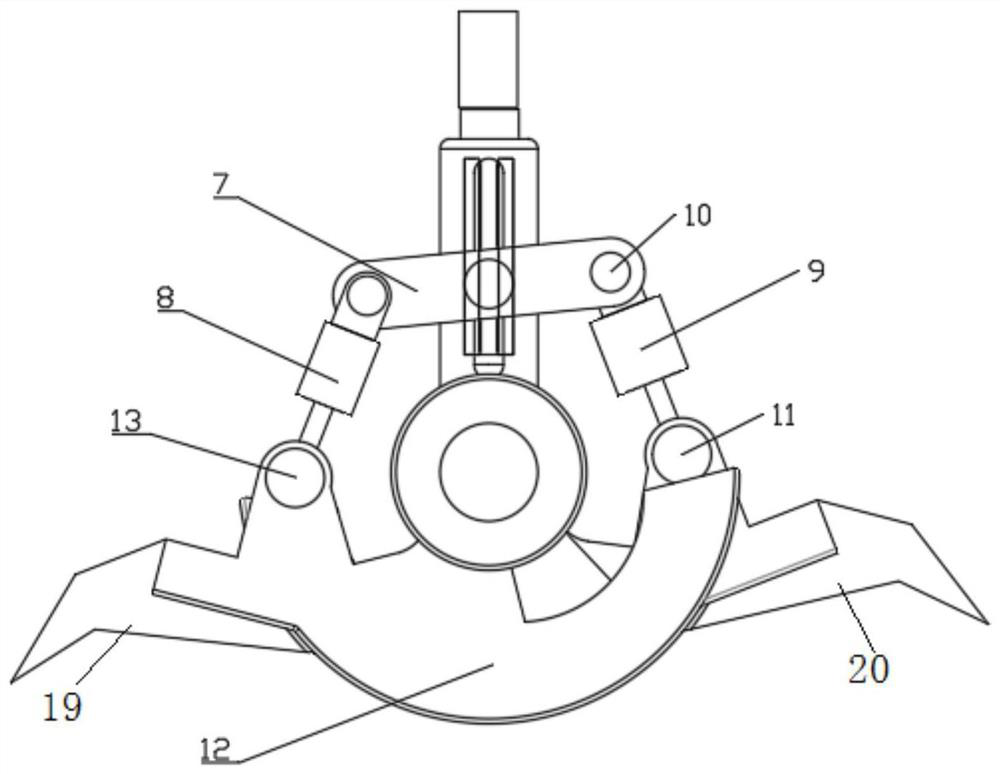
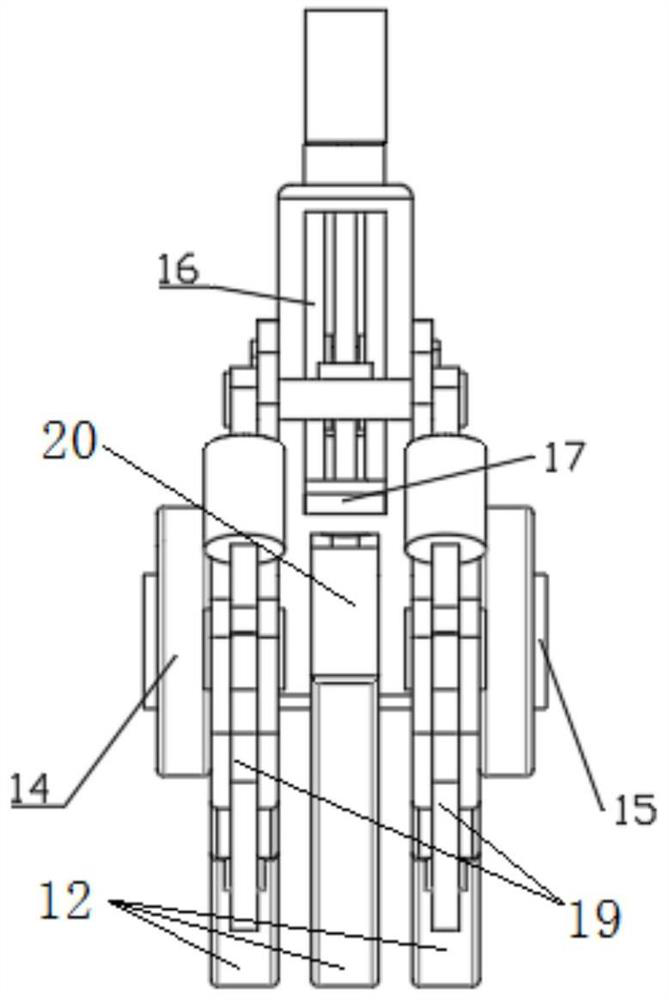
[0030] refer to Figure 1 ~ Figure 4 As shown, the wheel-step robot foot mechanism suitable for all-terrain road conditions in an embodiment provided by the present invention includes a foot body shell 1, a wheel step conversion mechanism and foot claws, and the wheel step conversion mechanism is arranged on the foot body shell 1 on;
[0031] The plantar claws include claws and a wheel body 12, and the wheel body 12 is connected to the lower end of the foot shell 1 through a kingpin shaft 15. The wheel body 12 is connected with one end of the claw, and the other end of the claw is connected with the wheel step conversion mechanism, and the wheel step The conversion mechanism drives the pawl and the wheel body 12 to rotate around the kingpin shaft 15; The claws are directly in contact with the ground, which can have a large grip. When the claws are r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More