

A method of grasping and releasing virtual objects by hand
A virtual object and grasping technology, applied in interdisciplinary fields, can solve the problems of lack of research on mutual occlusion, cumbersome implementation process, limited applicability and universality, and achieve the effect of solving the problem of virtual and real occlusion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0059] A method for grasping and releasing a virtual object by hand, comprising the following steps:
[0060] Step 1: Obtain the scaling ratio of virtual and real objects through the corresponding ratio conversion relationship between virtual objects and real objects in the real scene, realize the normalization of virtual objects, and facilitate the consistency of objects in the scene after virtual and real fusion.
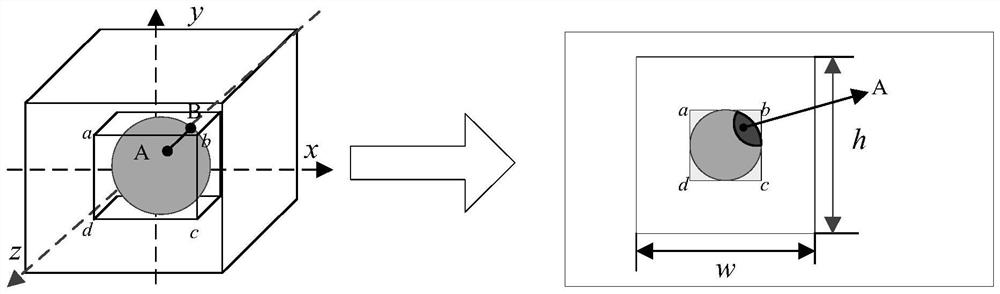
[0061] Normalize the length and width of the bottom quadrilateral of the minimum bounding box when the virtual object is drawn, so that the ratio of length and width is the same as that of the real object. By calculating the length, width and normalized value of the virtual object respectively The length and width ratio value of the object, and then get the zoom ratio of the virtual and real object.
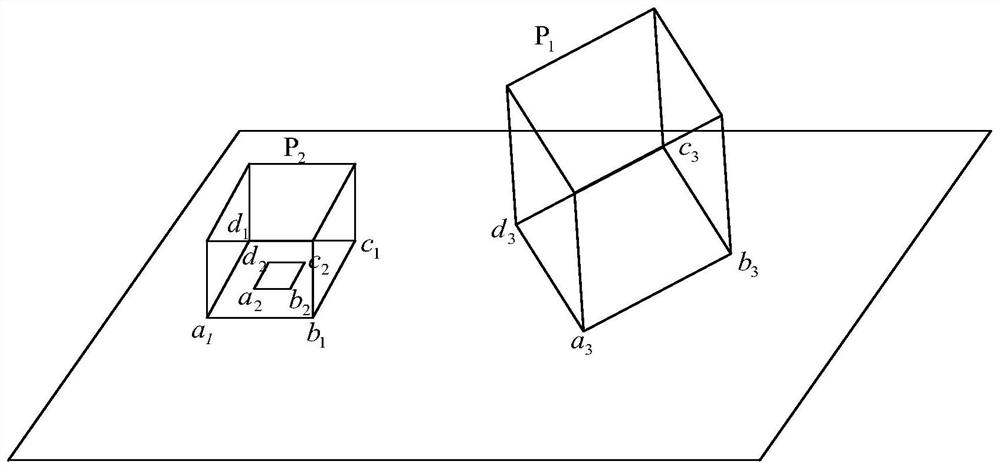
[0062] Such as figure 1 As shown, P 1 Indicates the spatial position of the smallest bounding box of the virtual object after matrix transformation, P 2 Indicates...
Embodiment 2
[0098] Embodiment 2 Specific use of the method of grasping and releasing virtual objects by hand
[0099] It is completed under Windows 7 operating system using VS2013, OpenCV and OpenGL. The hardware environment is a 3.3GHz i5 processor, a desktop computer with 4GB of running memory and a binocular camera. The internal parameters of the camera are pre-calculated and the experimental process is relatively stable.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More