

Digital display instrument reading identification method based on inspection robot
A technology for inspection robots and instrument readings, which is applied in the field of image processing and recognition, can solve the problems of low recognition efficiency and accuracy, poor versatility, high cost of manual inspection readings and recording, and achieve the effect of reducing the recognition time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0031] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
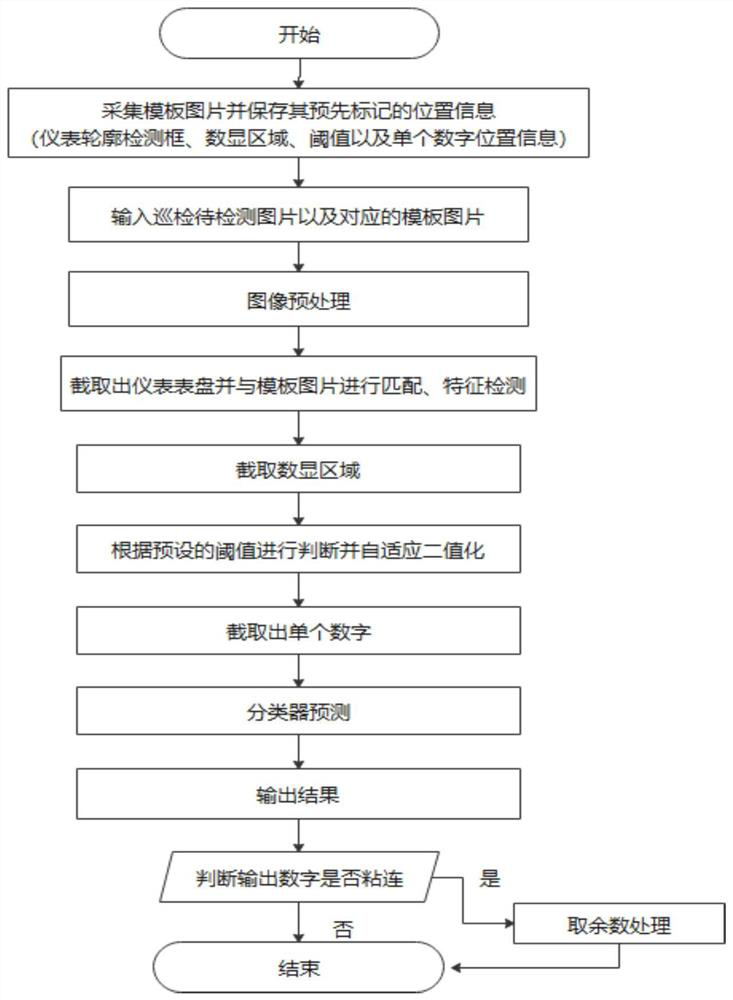
[0032] An intelligent inspection robot based on the present invention is a digital display instrument intelligent identification method, such as figure 1 As shown, the digital display instrument that needs to be identified is processed, and the specific implementation is carried out according to the following steps:
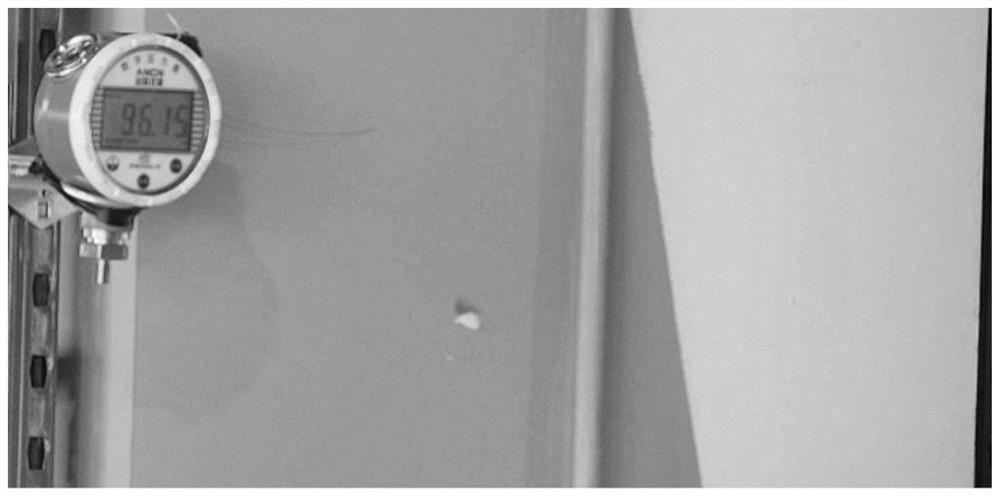
[0033] Step 1: Through the visible light camera mounted on the pan / tilt of the intelligent inspection robot and the image and video management process deployed on the robot body, the image of the digital display instrument is obtained; the process of obtaining the image of the digital display instrument is: the intelligent inspection robot adjusts the angle of the pan / tilt ( See "A Distributed Processing Method for Robot Cluster Image Recognition" patent), and then call the image acquisition module to obtain images, whic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More