

A Spraying Robot Based on Visual Recognition and Positioning
A spraying robot and visual recognition technology, applied in manipulators, spray booths, spraying devices, etc., can solve the problems of thick wrists and inability to spray small-hole workpieces, and achieve the effect of accurate probe positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
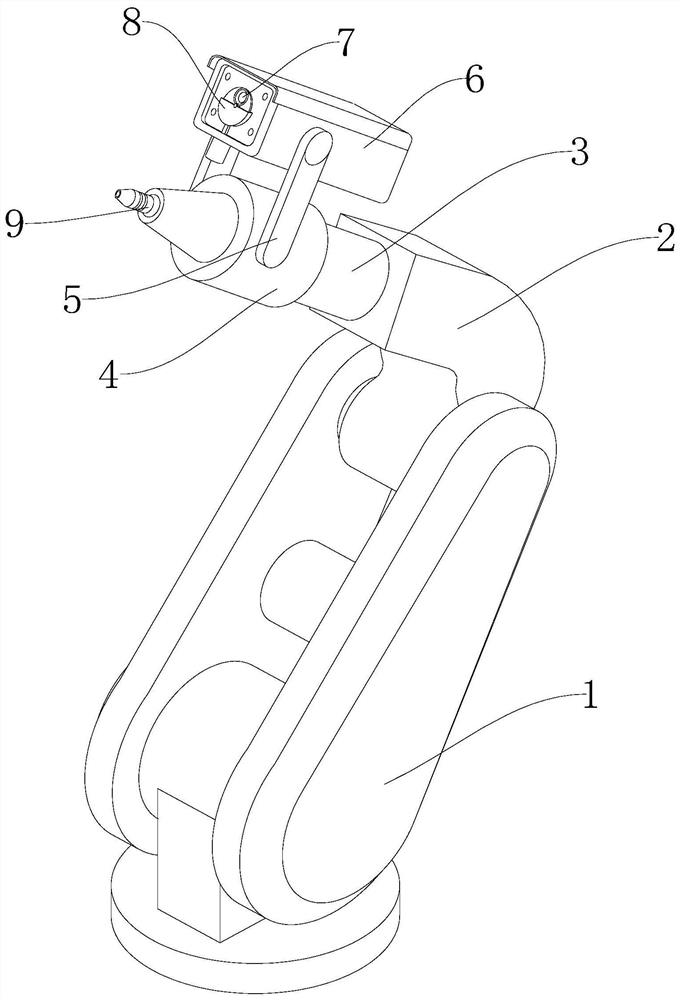
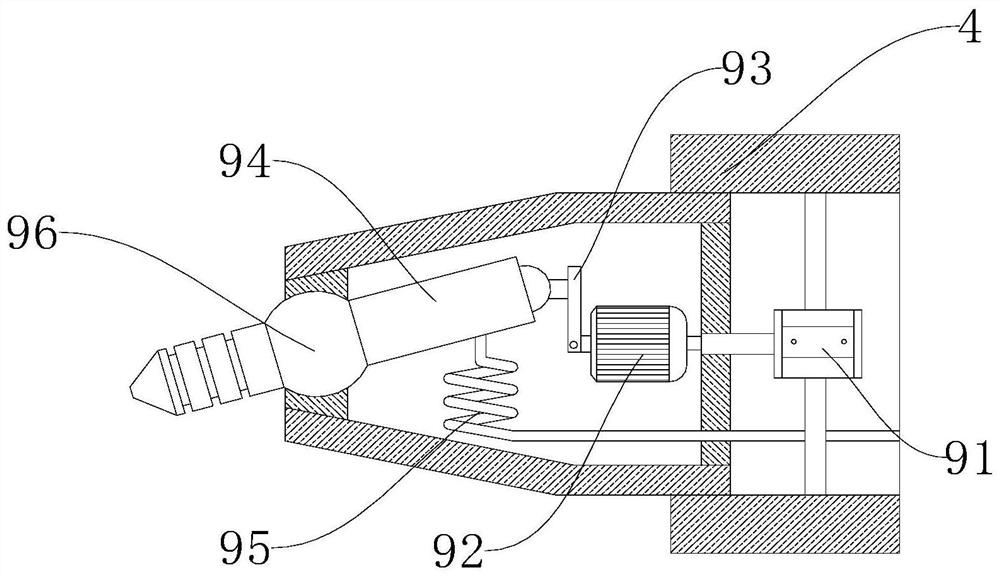
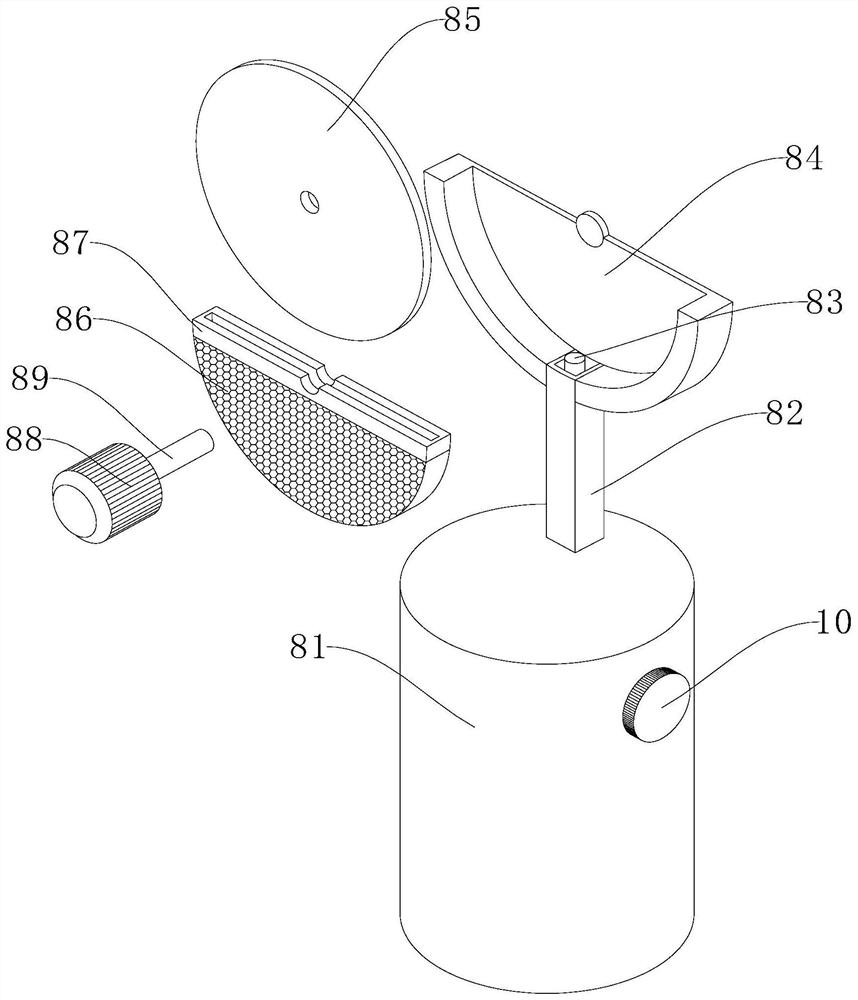
[0024] Example: such as figure 1 , figure 2 , image 3 and Figure 4 As shown, a spraying robot based on visual recognition and positioning of the present invention includes a main segment mechanical arm 1, a second segment mechanical arm 2 movably connected to the top of the main segment mechanical arm 1, and a rotating arm that is rotatably connected to the front end of the second segment mechanical arm 2 3 and the three-section mechanical arm 4 movably connected to the front end of the rotating arm 3, the top of the three-section mechanical arm 4 is provided with a monitoring probe 6, the monitoring probe 6 is movably connected with the three-section mechanical arm 4 through the probe support frame 5, and the monitoring probe 6 The front end is interspersed with a camera lens 7, the front end of the camera lens 7 is provided with a lens cleaning structure 8, and the inside of the three-section mechanical arm 4 is provided with an adjustable nozzle structure 9, and the ad...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More