

Wheel-leg hybrid drive mining robot based on five-rod mechanism
A hybrid drive, five-bar mechanism technology, applied in the field of robots, can solve the problems of insufficient obstacle-crossing ability and stability, difficult to meet high flexibility requirements, complex structure and other problems, and achieve good maneuverability, simple structure and low economic cost. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
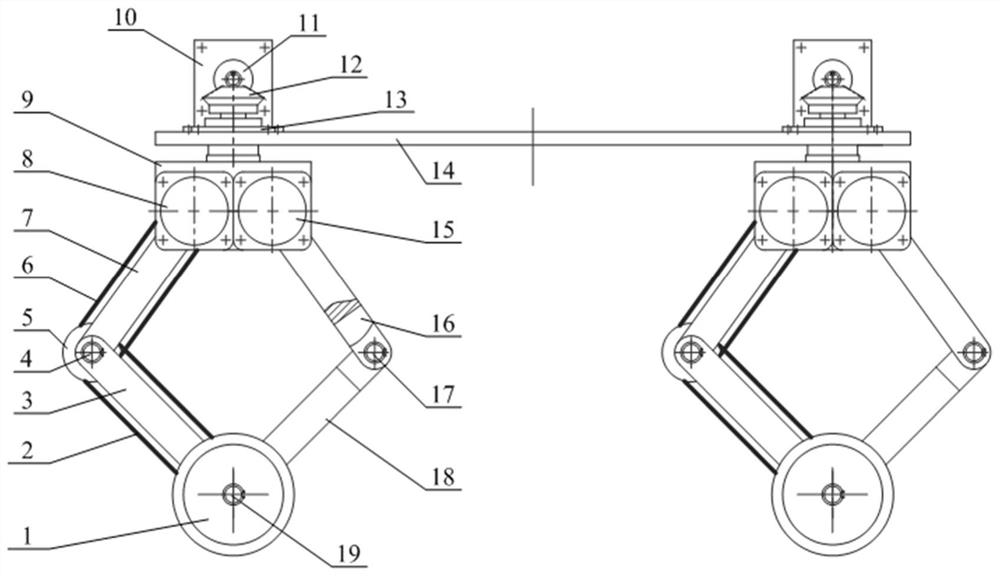
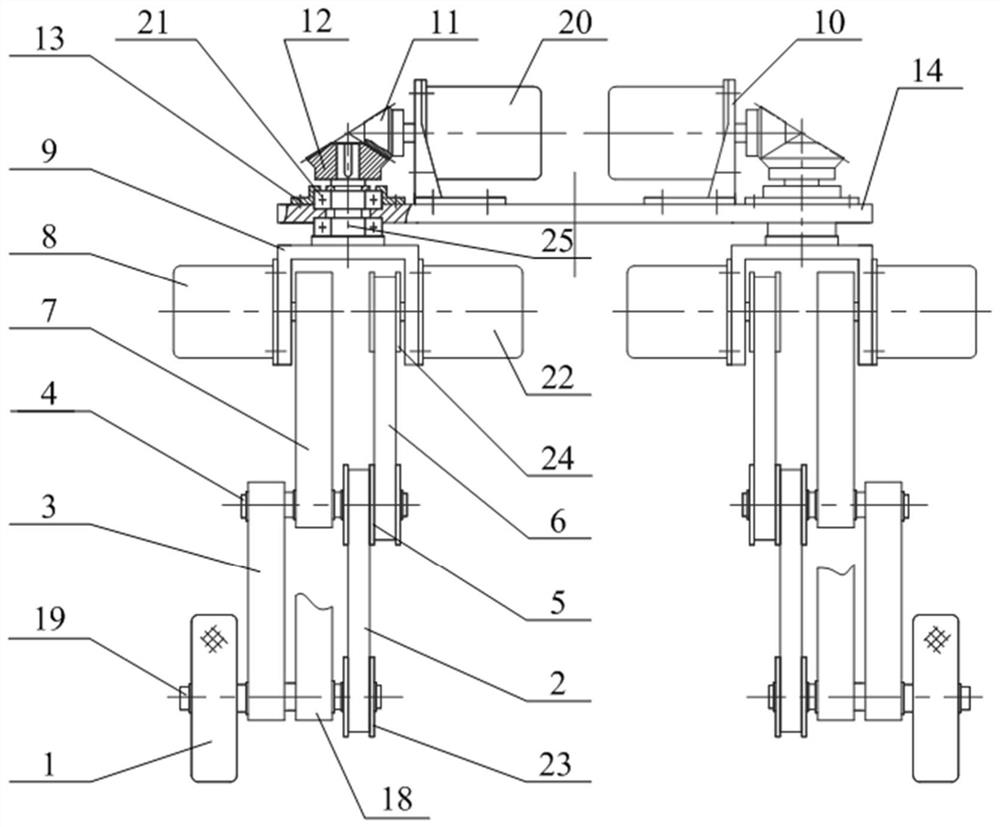
[0038] The present invention is a wheel-leg hybrid driving mining robot based on a five-bar mechanism, which can realize the height adjustment of the robot's carrying chassis, straight or oblique walking during wheeled movement, and human-like walking during legged movement. The realization of the aforesaid functions is described through the driving operation steps of a set of steering device and a wheel leg chain.
[0039] 1. Height adjustment of the carrying chassis
[0040] In the wheeled movement state, the upper leg bar I7 is driven to rotate a certain angle counterclockwise by the starting motor I8, or the upper leg bar II16 is driven to rotate a certain angle clockwise by the starting motor II15, or both are driven at the same time, both can lift the carrying chassis 14) On the contrary, the height of the carrying chassis 14 can be reduced.
[0041] The posture of the carrying chassis 14 , such as the forward tilt type, the forward tilt type, the horizontal type, etc.,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More