

Vehicle trajectory tracking control method based on linear model predictive control algorithm
A predictive control algorithm and vehicle trajectory technology, applied in vehicle position/route/altitude control, control/regulation system, non-electric variable control, etc. Problems such as poor tracking control robustness, to achieve the effect of improving vehicle trajectory tracking ability and improving real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
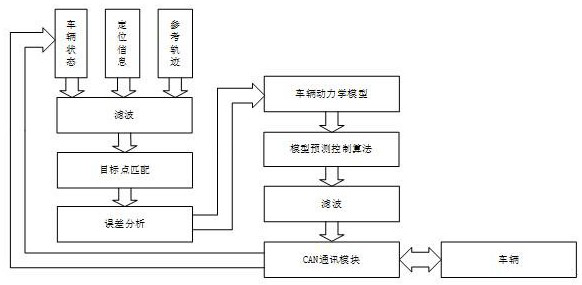
[0059] The invention discloses a vehicle trajectory tracking control method based on a linear model predictive control algorithm, through filtering the vehicle state, positioning information, reference trajectory, target point matching, error analysis, vehicle dynamics model and model predictive control algorithm, to obtain The vehicle steering wheel angle and the vehicle steering wheel speed are filtered again, and finally sent to the controlled vehicle to realize the vehicle trajectory tracking control based on the model predictive control algorithm. Its content is as follows.
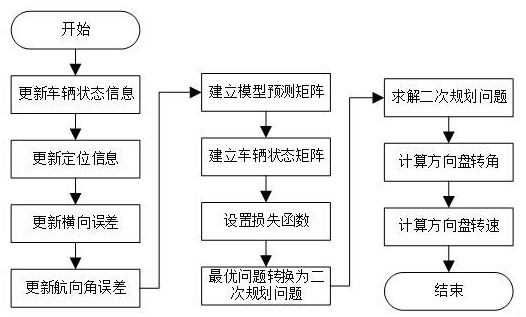
[0060] Such as figure 1 , figure 2 As shown, a vehicle trajectory tracking control method based on a linear model predictive control algorithm includes the following steps:
[0061] S1. Respectively collect vehicle state information and vehicle location information of the controlled vehicle, and collect a predetermined driving trajectory of the vehicle as a reference trajectory.
[0062] S1 speci...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More