

Unmanned ship collision avoidance method based on fuzzy control strategy double-window algorithm
A fuzzy control and unmanned boat technology, applied in the field of unmanned boat obstacle avoidance, can solve the problems that unmanned boats cannot adapt to sea conditions, do not consider the range limit of unmanned boats, and do not stipulate the end of the obstacle avoidance boundary of a single obstacle.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
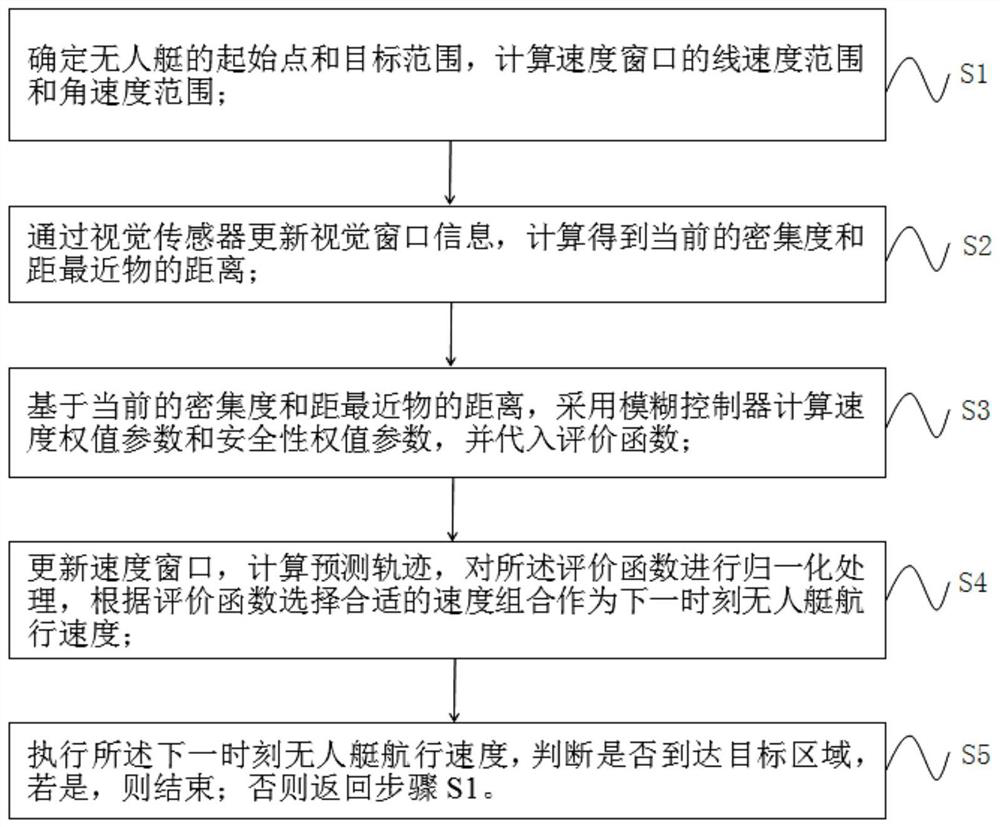
Method used
Image

Examples
Embodiment 1
[0128] When emphasizing the sailing speed, it is necessary to set β to be small and γ to be set to be large, that is, to sacrifice safety and ensure speed. The experimental setting is fixed at 1, and γ is 10. The experimental results are as follows Figure 8 shown. Figure 8 (a) is the trajectory map of the unmanned boat, the length of the entire trajectory is 118.10m, the number of iterations is 84, and the time is 10.938s. When passing through the dense obstacle area, the unmanned boat is too close to the obstacle, and the safety is low (the safety distance is 2.01m). Figure 8 (b) is the linear speed during navigation. It can be seen that the unmanned boat basically maintains the highest speed, even if it encounters obstacles and reduces the speed, it will quickly accelerate to the highest speed. Figure 8 (c) is the angular velocity during navigation. It can be seen from the corresponding trajectory diagram that there is no sharp turn during the navigation of the unmanne...
Embodiment 2
[0130] When emphasizing navigation safety, it is necessary to set β to be larger and γ to be smaller, that is, to sacrifice speed to ensure safety. The experimental settings are fixed at 10 for β and 1 for γ, and the experimental results are as follows Figure 9 shown. Figure 9 (a) is the trajectory map of the unmanned boat, the trajectory length is 117.40m, the number of iterations is 92, the time is 12.727s, and the safety distance is 3.53m. The trajectory length, number of iterations and time are all higher than the above experiments, but the safety is better (safety distance is 3.53m). Figure 9 (b) is the linear velocity during navigation. It can be seen that compared with the above experiments, the unmanned boat will slow down when encountering obstacles, and it is in a low-speed navigation state for part of the time. The angular velocity during navigation is similar to the above experiment.
Embodiment 3
[0132] When dynamic weight parameters are used, both speed and security can be guaranteed. The experimental results are as follows: Figure 10 shown. Figure 10 (a) is the trajectory map of the unmanned boat, the trajectory length is 118.80m, the number of iterations is 83, the time is 11.410s, and the safety distance is 2.79m. Compared with the previous two experiments, the unmanned boat can shorten the number of iterations and running time under the premise of ensuring safety, so that the unmanned boat has higher navigation efficiency. Figure 10 (b) is the linear speed during navigation, Figure 10 (c) is the angular velocity during the navigation process. It can be seen that compared with the previous two experiments, when encountering an obstacle, the appropriate speed will be selected to avoid the obstacle quickly under the condition of ensuring the speed, and there is no particularly small speed. Happening. Figure 11 For the comparison of trajectories under the thre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More