

A Map Matching Method for Urban Intersections
A map matching and intersection technology, applied in the field of GPS data collection, can solve problems such as affecting matching efficiency, redundant point mismatch, abnormal round-tripping of matching results, etc., to achieve accurate trajectory matching and improve accuracy.
Active Publication Date: 2021-08-31
UNIV OF ELECTRONICS SCI & TECH OF CHINA
View PDF9 Cites 0 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0003] The purpose of the present invention is to solve the problem that redundant points are very easy to cause mismatch, which makes the matching result abnormal back and forth, sawtooth and other forms, and affects the overall matching efficiency.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
0.7 0.1 0.6 DS Fusion Probability 0.78 0.04 0.16
[0056] Normalization coefficient =
[0057] = 0.8*0.7+0.3*0.1+0.2*0.6
[0058] = 0.71
[0059] Calculated using the Dempster composition rule:
[0060] GPS point P1 is on the road section The fusion probability on is:
[0061]
[0062] =0.8X0.7 / 0.71
[0063] =0.78
[0064] GPS point P1 is on the road segment The fusion probability on is:
[0065]
[0066] =0.3*0.1 / 0.71
[0067] =0.04
[0068] GPS point P1 is on the road section The fusion probability on is:
[0069] =0.2*0.6 / 0.71
[0070] =0.16
[0071] Therefore match the trajectory point p to the road segment (highest probability) on.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
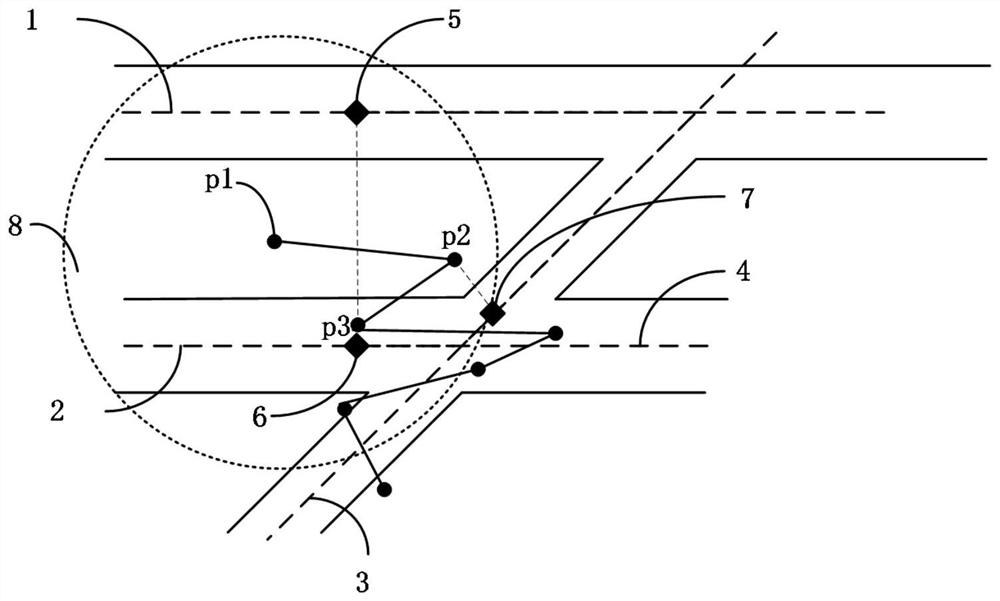
The invention relates to the technical field of GPS data collection and provides a method for matching city intersection maps. The purpose of the present invention is to solve the problem that redundant points easily cause mismatch, which causes abnormal back-and-forth, zigzag and other forms of matching results, which affects the overall matching efficiency. The main plan includes determining the intersection in the road network, specifying the size of the intersection area, taking the intersection as the center of the circle, and taking the width of the road into account, making a circle, and the points inside the circle are all GPS points that have entered the intersection; The filtered GPS points in the area are filtered to obtain the filtered GPS points; the map matching in the intersection area is used to calculate the probability of the remaining GPS points after filtering, and the probability is fused with the D‑S evidence theory to obtain the road section where the GPS points are located. Map the GPS points to the corresponding road sections, and then connect all GPS points in chronological order to obtain the driving track.
Description
technical field [0001] The invention relates to the technical field of GPS data collection, and provides a method for matching city intersection maps. Background technique [0002] In existing studies, researchers often focus on how to match low-sampling rate GPS points as accurately as possible. However, due to the advancement of science and technology, today's GPS data are often high-sampling rate trajectory data. In urban areas, when the road conditions are poor and there are many intersections, the low-speed driving of vehicles leads to high sampling rate GPS data containing a large number of redundant points. These redundant points are very easy to cause mismatch, which makes the matching result appear abnormal back and forth, zigzag and other forms, affecting the overall matching efficiency. Contents of the invention [0003] The purpose of the present invention is to solve the problem that redundant points easily cause mismatch, which causes abnormal back-and-forth...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityPatents(China)
IPC IPC(8): G06F16/29G06K9/62G01S19/39
CPCG06F16/29G01S19/393G06F18/22G06F18/25
Inventor牛新征刘鹏飞陈冬子郑云红匡洁良王仕民吴鹏
OwnerUNIV OF ELECTRONICS SCI & TECH OF CHINA