

A water, land and air amphibious robot
A technology of water, land, air, and robots, which is applied in the field of drones, can solve the problems of slow exploration and search and rescue work, and easily hinders the acquisition of enough useful and large enough information, so as to improve flexibility, stability, and independence , the effect of improving the overall stiffness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
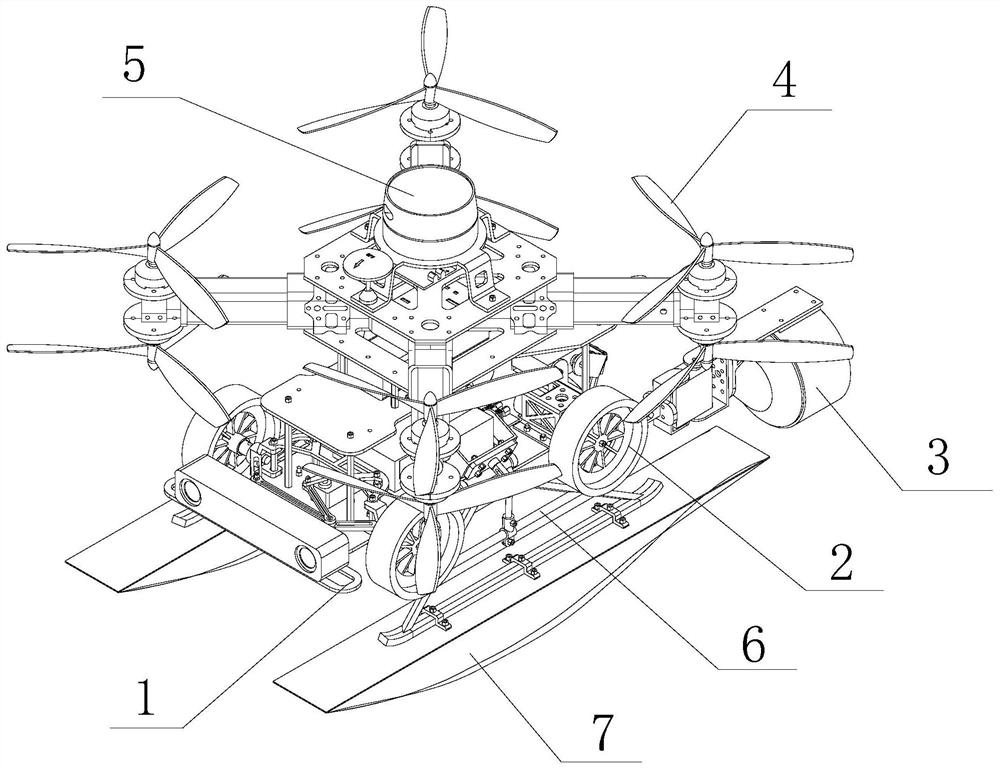
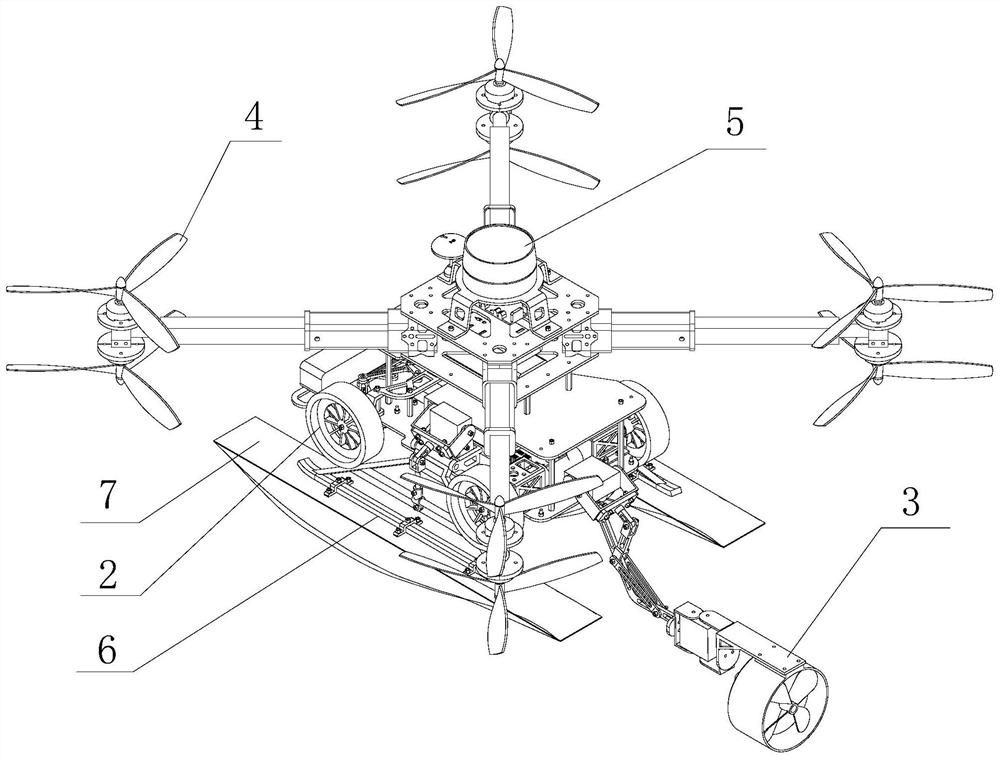
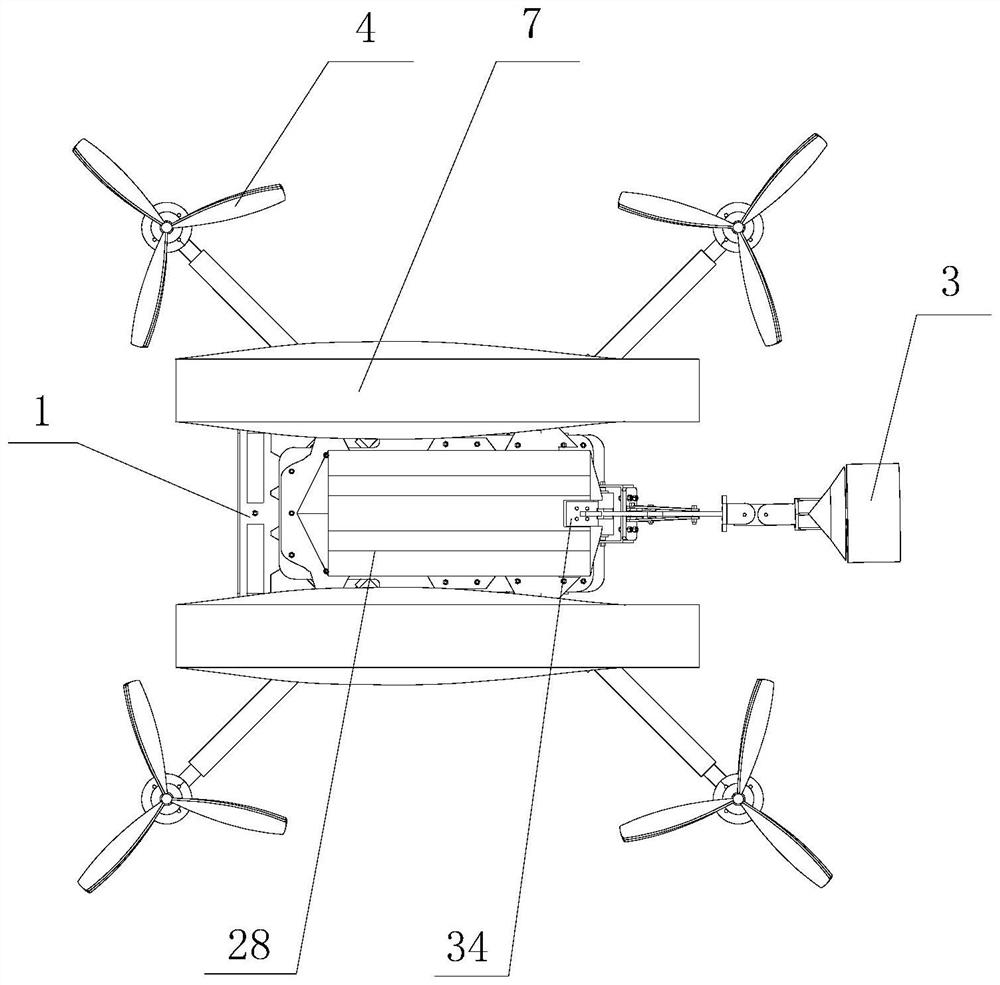
[0039] Such as Figure 1 to Figure 7 As shown, the water, land and air amphibious UAV of the present invention includes: a main chassis 1, which is used to install the land driving module 2, and the transmission mechanism of the water surface driving module 3 and the landing gear module 6;
[0040] The land driving module 2 adopts a four-wheel motion mode, including a front two-wheel 21, a first steering gear 22, a steering mechanism 24, a rear two-wheel 26 and a motor 27; The steering of the wheel 21; the rear double wheels 26 are respectively connected to the output ends of the two motors 27, and the rear double wheels 26 are driven by the motor 27 to rotate to realize the robot moving on land;
[0041] The water surface drive module 3 adopts a double steering gear control method, including a lifting steering gear 31, a lifting steering gear bracket 32, a lifting mechanism 33, a second steering steering gear 35, an ROV underwater thruster 36 and a propeller 37; the lifting s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More