Underwater fishing net detection method based on forward-looking sonar image and AUV platform
A forward-looking sonar, detection method technology, applied in image data processing, graphic image conversion, re-radiation of sound waves, etc., to achieve the effect of reducing the number of parameters and computing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] In order to understand the above-mentioned purpose, features and advantages of the present invention more clearly, the present invention will be further described below in conjunction with the accompanying drawings and embodiments. Many specific details are set forth in the following description to facilitate a full understanding of the present invention. However, the present invention can also be implemented in other ways than those described here. Therefore, the present invention is not limited to the specific embodiments disclosed below.
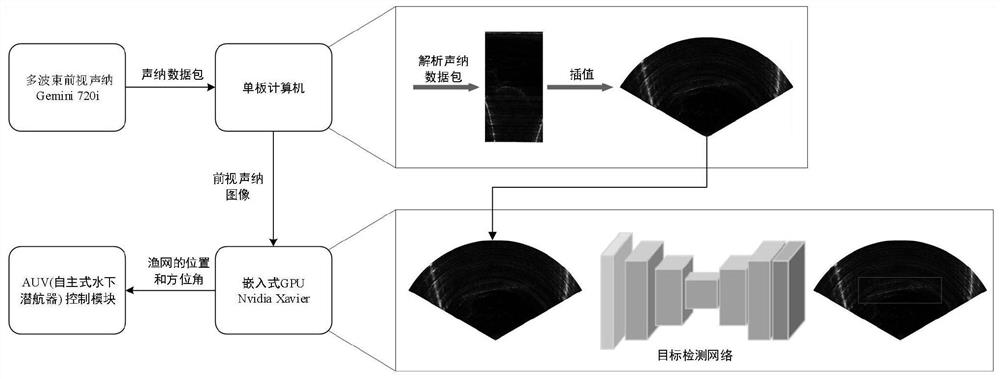
[0069] This embodiment proposes a method for detecting underwater fishing nets based on forward-looking sonar images and an AUV platform, which specifically includes the following steps:
[0070] Step A, collecting and obtaining the forward-looking sonar original data package through the multi-beam forward-looking sonar carried on the AUV;
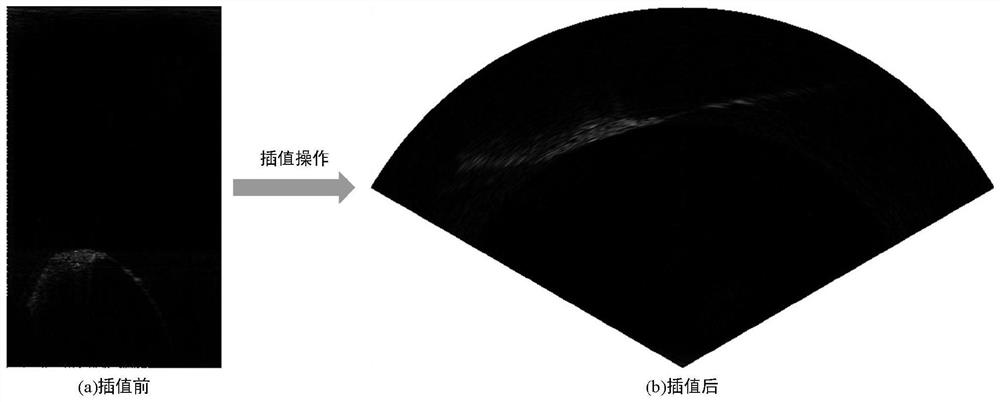
[0071] Step B. Perform real-time analysis on the forward-looking sonar original data packet...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More