

Movable seven-degree-of-freedom carrying mechanical arm
A technology of handling machinery and degrees of freedom, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of narrow handling work range, low degree of freedom, and inability to transport items over long distances, so as to improve handling efficiency, use flexibility, and improve The effect of work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
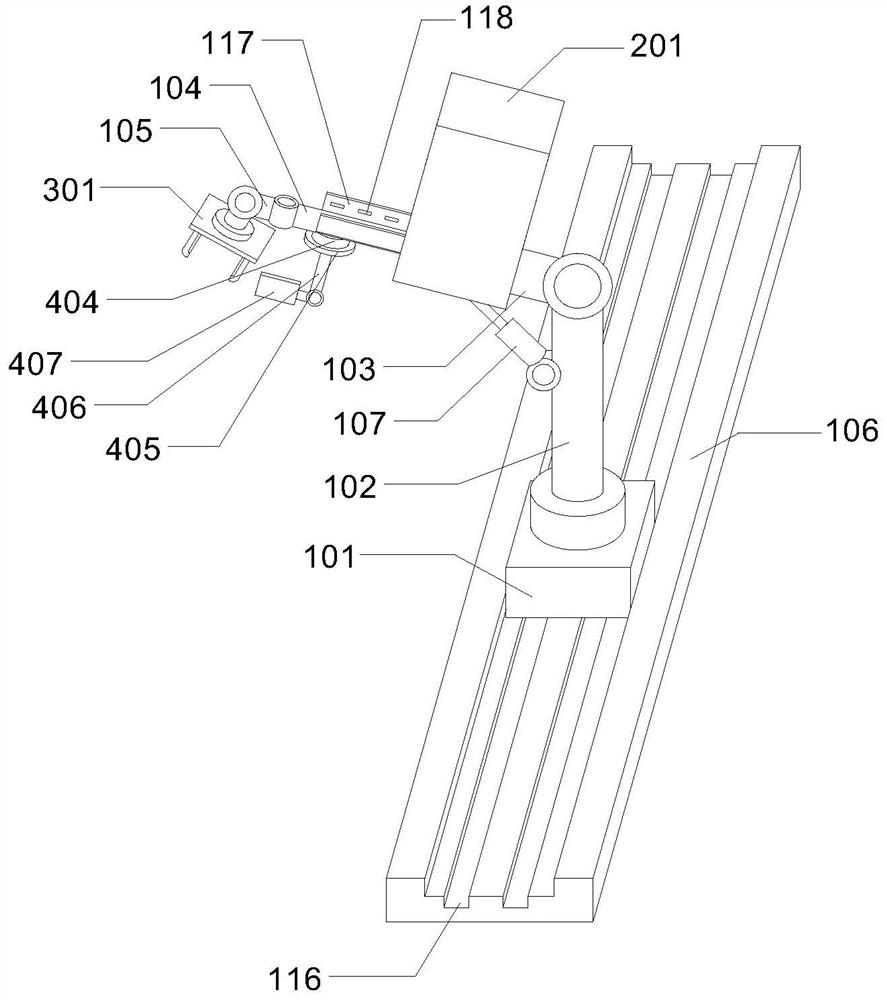
[0032] see Figure 1-6 , in an embodiment of the present invention, a movable seven-degree-of-freedom transporting robot arm includes a base 101, a first connecting arm 102 is installed in the middle of the base 101 for rotation, and the top of the first connecting arm 102 connects with the second power shaft through the first power shaft. One end of the connecting arm 103 is rotationally connected, and the center of the second connecting arm 103 is fixedly equi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More