Balance car main control system, control system and balance car
A main control system, a technology of self-balancing vehicles, applied in general control systems, control/regulation systems, vehicle position/route/height control, etc., can solve problems affecting circuit stability, tedious installation, production obstacles, etc., and achieve stable communication. , to avoid maintenance and replacement, the effect of simplifying the production process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Example Embodiment
[0068]Example one
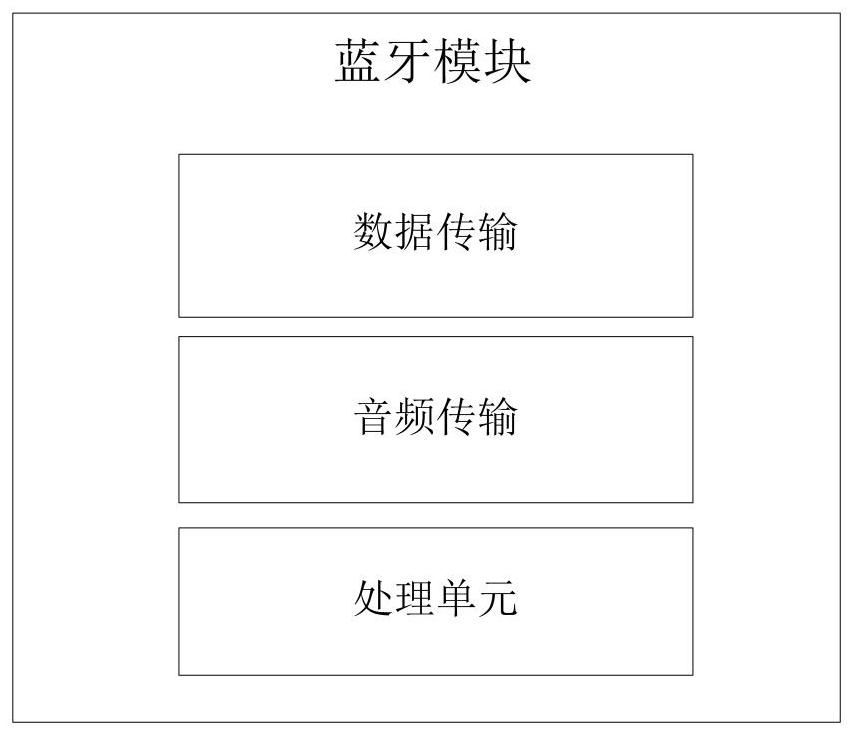
[0069]EXAMPLES One provides a balanced owner, intended to integrate control functions, data pass, and Bluetooth audio functions, to ensure the provision of Bluetooth modules, and reduce external connectivity and welding. Step, simplify production steps, reduce manufacturing costs, and all modules of the main control system use the power supply module to power, ensure normal operation, so that the stability of the signal transmission is stronger, and the control of one motor of the balance vehicle is realized.
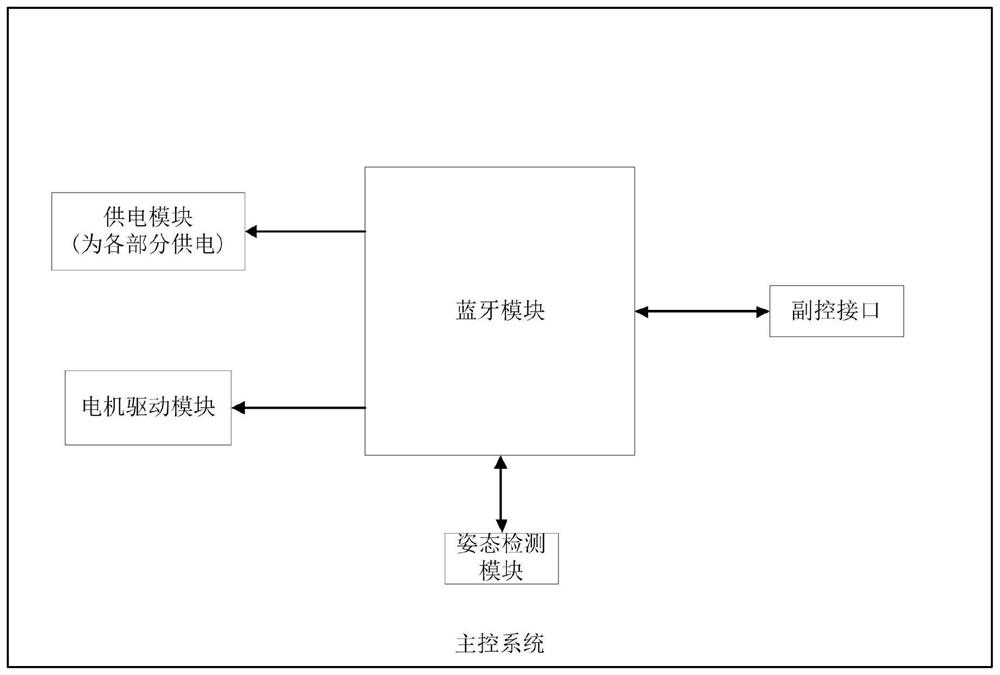
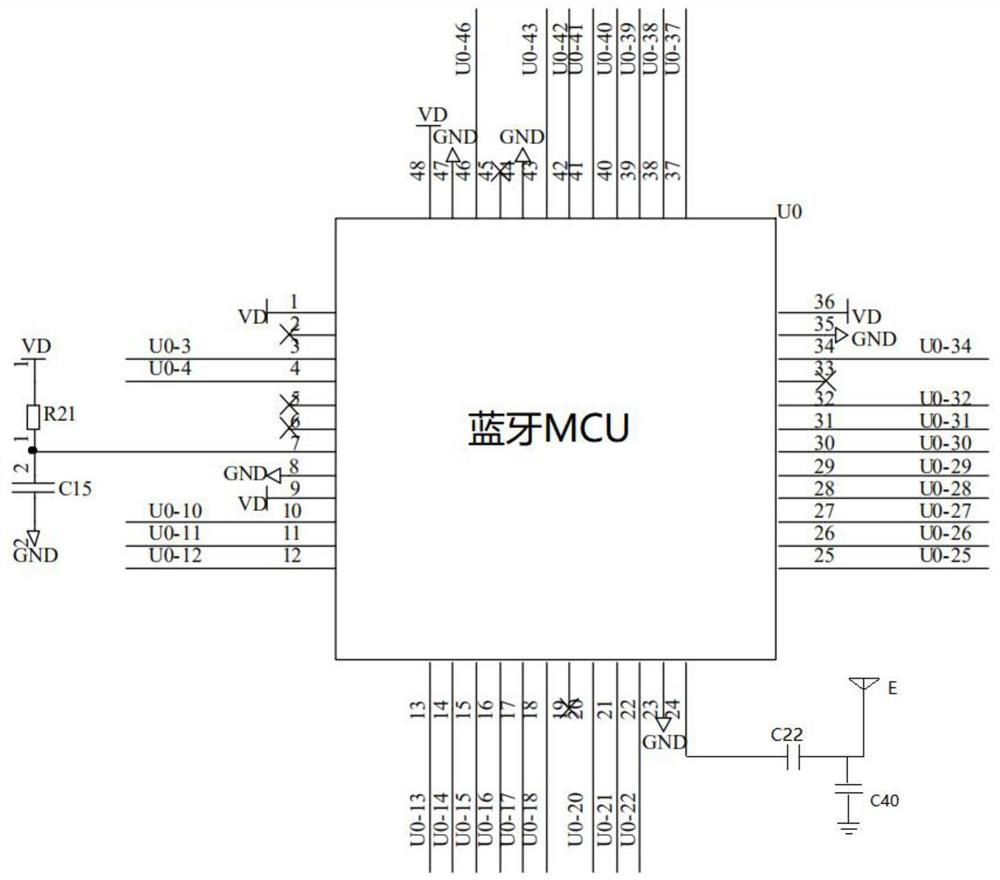
[0070]Please refer tofigure 1 As shown, a balanced owner control system, including Bluetooth modules, motor drive modules, posture detection modules, deposition interfaces, and power modules. The Bluetooth module is used to detect the signal, the detection signal processing, and the transmission control signal, the Bluetooth module can use a variety of embedded microcontrollers for various integrated Bluetooth transmission functions, detect the detection signals...
Example Embodiment
[0083]Example 2
[0084]Embodiment 2 is an improvement performed on the basis of the embodiment, in order to meet the different power supply requirements of the respective circuit modules of the master system, the power supply module provides high voltage of the battery power source through the first power supply unit, the second power supply unit, and the third power supply unit. Down to different supply voltages, the first power supply unit, the second power supply unit, and the third power unit are sequentially connected. The first power supply unit reduced the power supply voltage Va as a voltage Vb, and the second power supply unit degraded the voltage Vb to a voltage Vc, and the third power supply unit degraded the voltage Vc to a voltage VD. The voltage Vd output from the third power supply unit is powered by the Bluetooth module, and the voltage Vc output from the second power unit is powered by the audio power amplifier module. The second power supply unit includes a low press...
Example Embodiment
[0091]Example three
[0092]Embodiment 3 is an improvement performed on the basis of the first or embodiments, and the balanced owner includes a brake detection module and a current detecting module. The brake detection module is configured to detect the motor drive module current, the brake detection module to connect the motor drive module and the Bluetooth module. The current detecting module is configured to detect the motor operating current, the current detecting circuit to connect the motor drive module and the Bluetooth module. The power supply module provides the required operating voltage for the brake detection module and the current detection module.
[0093]Circle of the brake detection module, please refer toFigure 8 As shown, the brake detection module includes a capacitor C29, a resistor R110, a resistor R109, a triode Q1, and a resistor R108; a first end of the capacitor C29 connected to the Bluetooth module, the second end of the capacitor C29, and the first end of the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com