

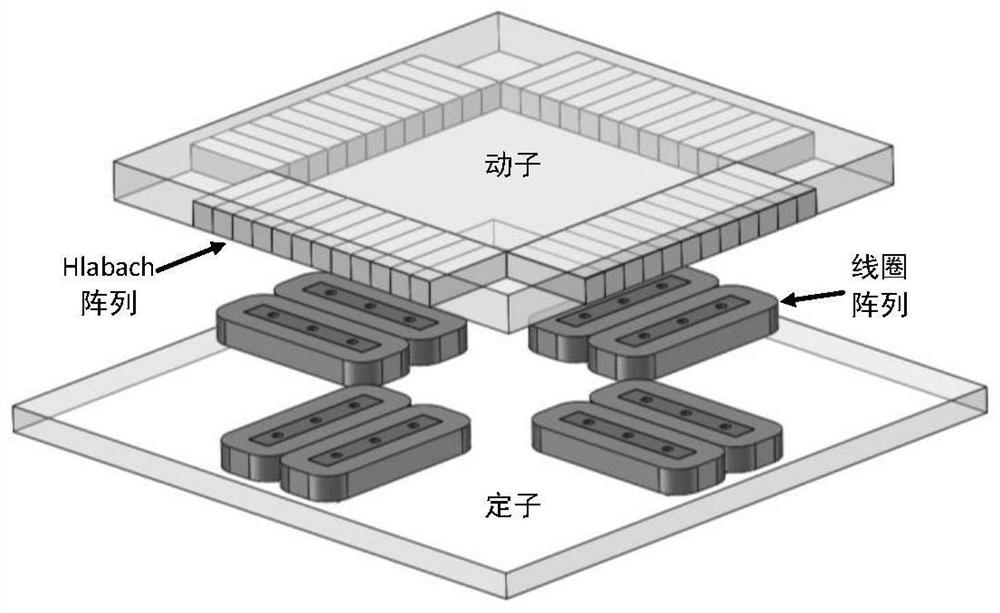
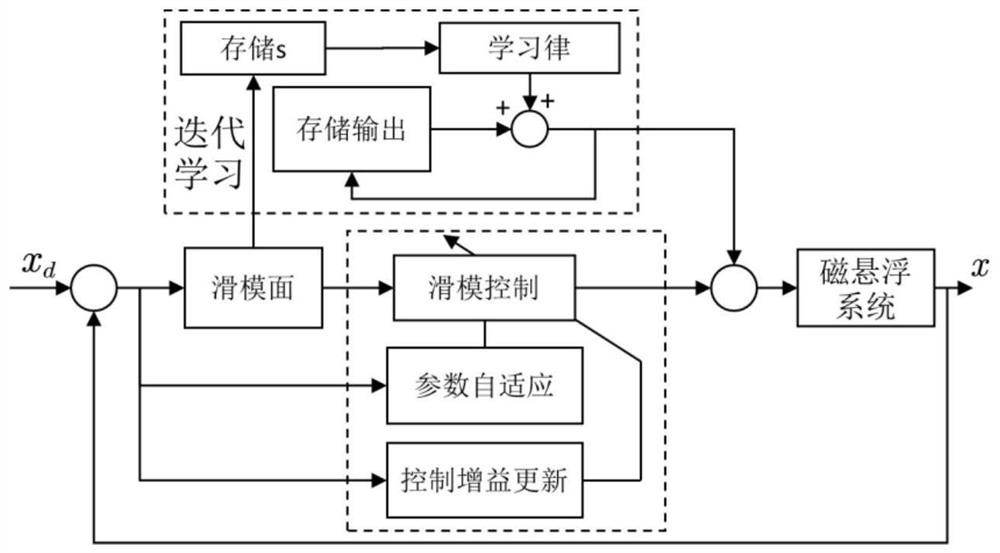
A self-adaptive learning sliding mode control method for multi-degree-of-freedom magnetic levitation planar motor
An adaptive learning and adaptive sliding mode technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems that affect the transient tracking effect of the system, cannot guarantee the stability of the system, and the tracking effect is conservative, etc. Achieve the effect of good adaptive ability, improve tracking accuracy, improve tracking accuracy and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] In order to facilitate those of ordinary skill in the art to understand and implement the present invention, the present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the implementation examples described here are only used to illustrate and explain the present invention, and are not intended to limit this invention.
[0045] Below will combine the appended in the embodiment of the present invention Figure 1-4 , clearly and completely describe the technical solutions in the embodiments of the present invention.
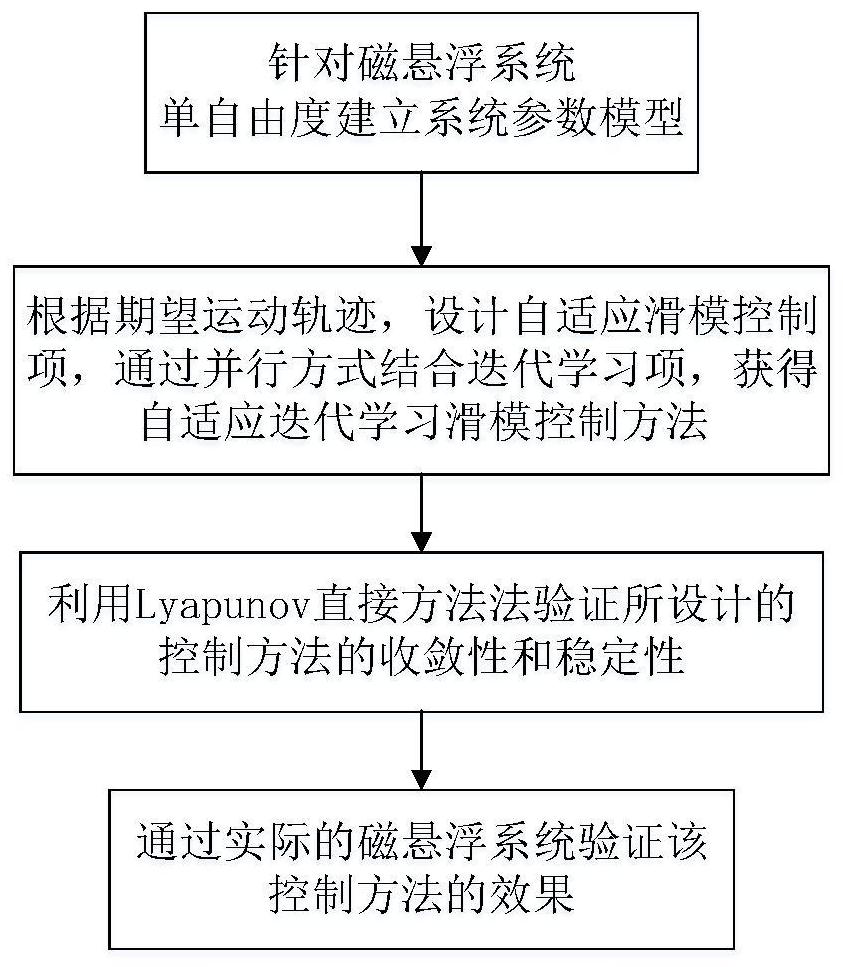
[0046] The first embodiment of the present invention is a multi-degree-of-freedom magnetic levitation planar motor adaptive iterative learning sliding mode control method, which is characterized in that the operation steps are as follows
[0047] Step 1: Use the dynamic decoupling model of the maglev planar motor to transform the multi-freedom control model into ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More