

A method for positioning and eliminating swing of an underactuated tower crane with load lifting motion
A technology of tower crane and lifting movement, applied in the direction of transportation and packaging, load hanging components, safety devices, etc., can solve the problems of external disturbance, natural frequency and other dynamic characteristics, parameter uncertainty and other problems, and achieve stable convergence speed Improvement, fast and efficient trajectory tracking and positioning, load swing suppression, and enhanced robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
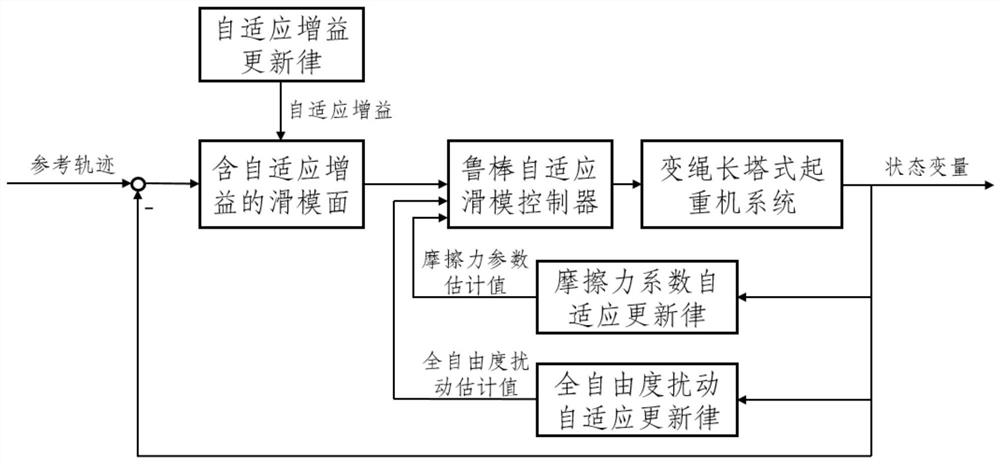
Method used
Image

Examples
Embodiment 1
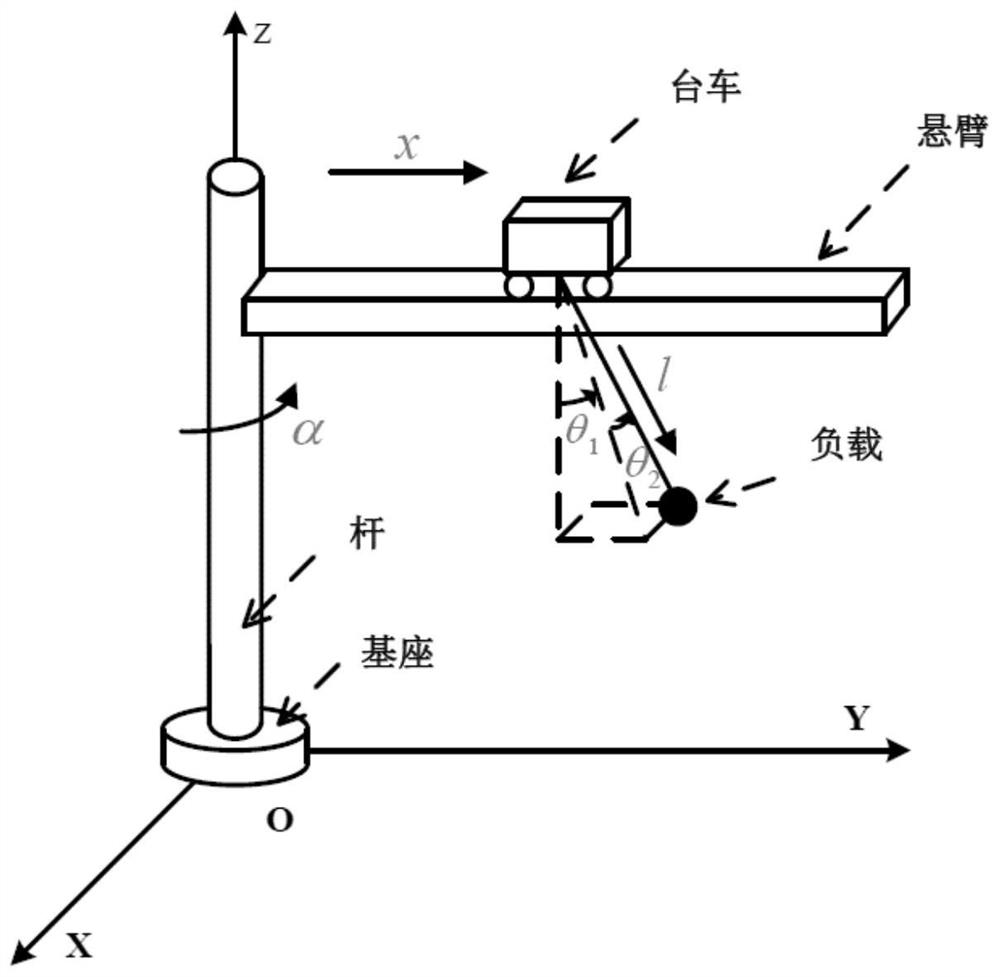
[0062] Traditional underactuated crane positioning and anti-swing control is usually aimed at the bridge crane system. Even if the multi-degree-of-freedom bridge crane moves in three-dimensional space, the dynamic nature of its drive mechanism is still a linear force, and the dynamic characteristics are still simple and easy to control. , but when there are different driving forces in the crane transportation task, such as the control of the tower crane studied in the present invention, one direction is the translational force of the trolley, and the other direction is the torque of the boom; at this time, due to the centrifugal motion The participation of the system makes the dynamic characteristics of the system very complicated. At the same time, when the load is lifted and lowered, the natural frequency of the load swing of the crane system will change. At this time, it is inevitable that the previous design for the ordinary simple pendulum will appear. Controller failure; ...
Embodiment 2
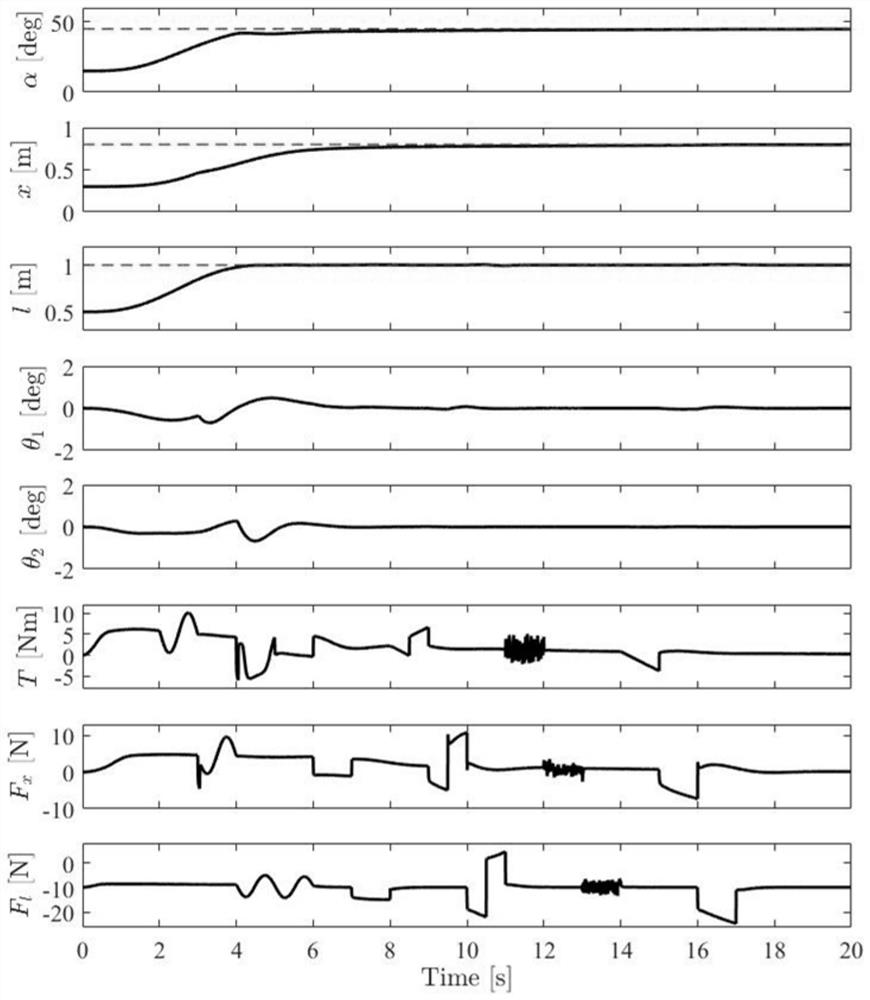
[0133] refer to Figure 3-4 , is the second embodiment of the present invention. In order to better verify and illustrate the technical effects adopted in the method of the present invention, the traditional controller LQR is selected for testing in this embodiment, and the test results are compared with scientific demonstration methods to verify The real effect of this method.
[0134] In order to conduct experiments better, in the simulation environment in MATLAB / Simulink to verify the situation when the device has friction and full-degree-of-freedom integrated interference, the controller LQR and the controller using this control method are selected for experiments, and the controller LQR uses The control method is:
[0135]
[0136]
[0137]
[0138] For the controller of this method, the parameters are selected as:
[0139] k 1 =0.19,k 2 =0.21,k 3 =5.5,k 4 =7.8,k 5 =7.8,
[0140] mu i =280,γ i =80,i=1,...,5
[0141]
[0142]
[0143]
[0144] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More