

A Fast Multi-sensor Potential Probability Hypothesis Density Filtering Method
A probabilistic hypothesis density, multi-sensor technology, applied in the field of target tracking, can solve the problems of unguaranteed tracking performance, low calculation efficiency, unstable performance, etc., and achieve good engineering application prospects, improved tracking performance, and stable computing time. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
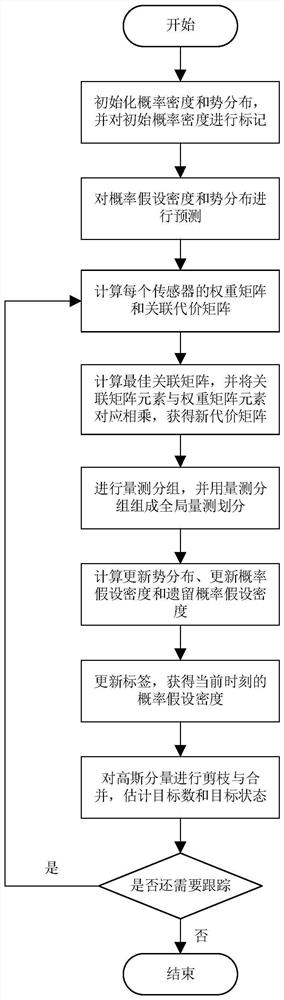
[0139] combine figure 1 , a fast multi-sensor potential probability hypothesis density filtering method of the present invention, comprising the following steps:
[0140] S1, there are a total of Y sensors in the scene, and the sensor numbers γ∈{1, 2, ..., Υ}; set the initial moment k=0, initialize the potential distribution (target number distribution) ρ 0 (n) and probability hypothesis density D 0 (x);
[0141] S2, the probability hypothesis density D of the previous moment (k-1 moment) k-1 (x) and potential distribution ρ k-1 (n), predict the current moment (k moment), and obtain the predicted probability hypothesis density D k|k-1 (x) and predicted potential distribution ρ k|k-1 (n);
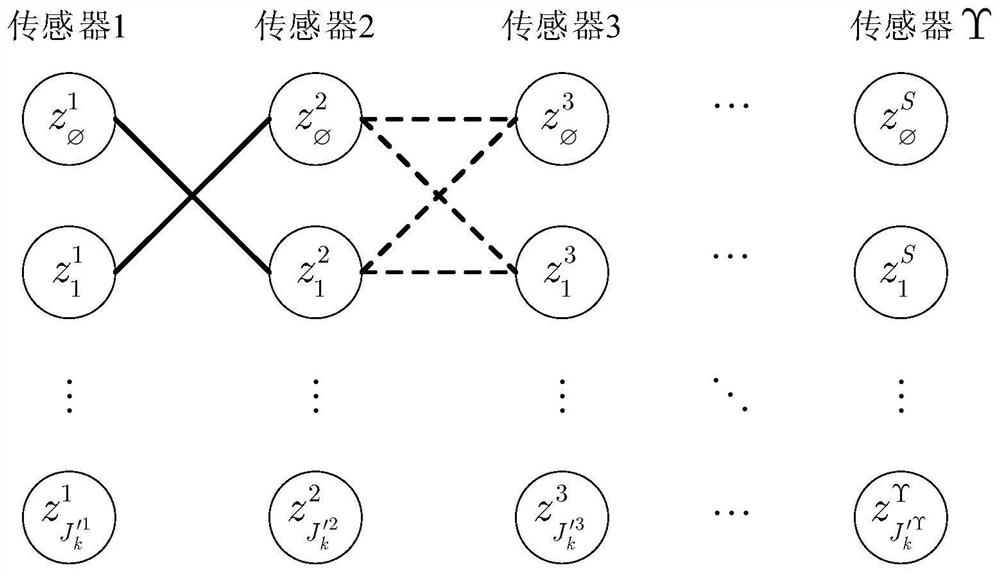
[0142] S3, obtain the measurement set of sensor γ at the current moment in is the measurement state, is the number of measurements, through the measurement set of each sensor, calculate the weight matrix and cost matrix of each sensor;
[0143] S4, using the cost matrix obtained...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More