

Collision-free path planning method and device for welding robot in complex environment
A technology for welding robots and complex environments, applied in the fields of collision-free path planning for welding robots, computer equipment, and computer-readable storage media, can solve problems such as time-consuming manual planning and inability to guarantee quality, and achieve improved welding efficiency and strong search capabilities. Capability and Robust, Efficient Effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described embodiments It is a part of embodiments of the present invention, but not all embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
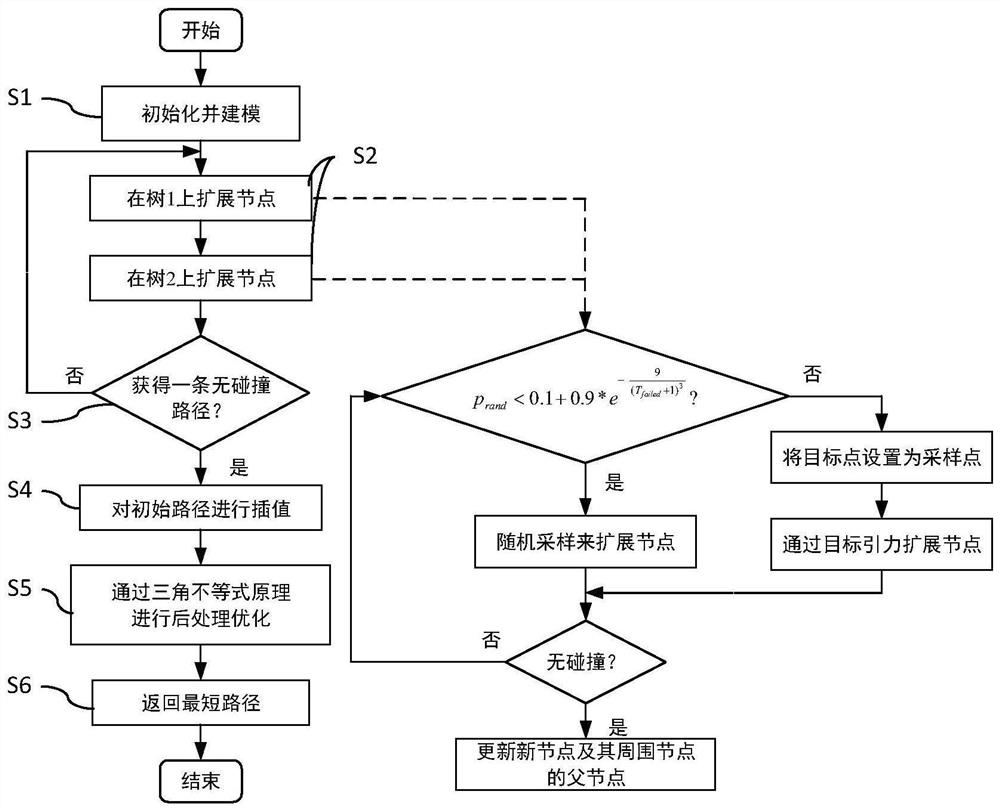
[0047] Such as figure 1 As shown, the embodiment of the present invention provides a collision-free path planning method for a welding robot in a complex environment, which specifically includes the following steps:
[0048] S1. Initialize and model obstacles in the environment;
[0049] S2. Expand the nodes on the first node tree and the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More