

Robot full-coverage path planning method based on secondary region division
A path planning and area division technology, applied in two-dimensional position/channel control, instruments, vehicle position/route/altitude control and other directions, which can solve the problems of lack of efficiency and applicability, many turns, and fuzzy division of areas. , to improve the efficiency of path planning, reduce the overlap of traversal, and reduce the number of turns
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] Embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings and examples. The following examples are used to illustrate the present invention, but should not be used to limit the scope of the present invention.
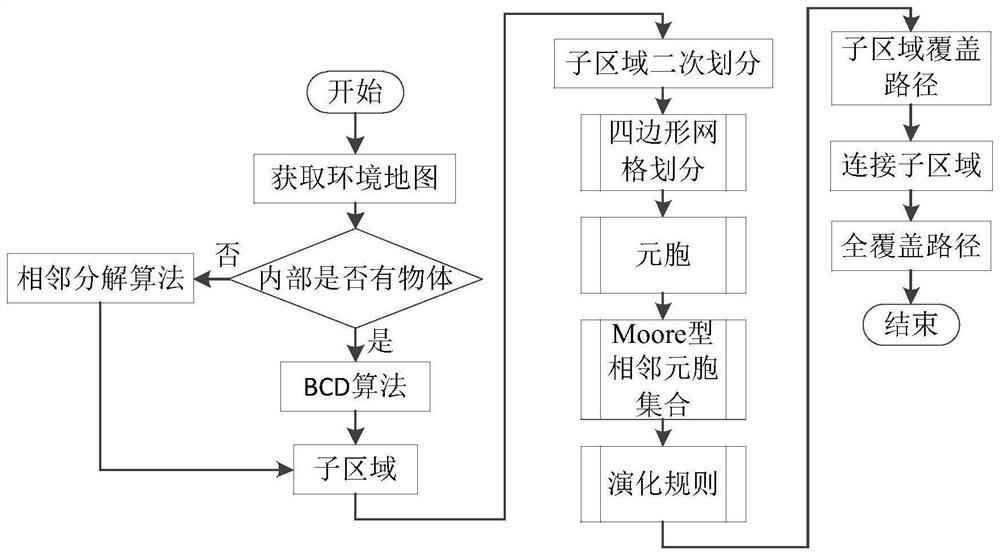
[0055] Such as figure 1 As shown, a robot full-coverage path planning method based on quadratic area division includes the following steps:
[0056] Step 1. Judging whether there is an occupied object in the middle of the given environment map according to the obtained prior map; the specific judgment method includes the following steps:
[0057] Step 1.1. The indoor environment map acquired by the mobile robot is composed of single-channel pixel points. The pixel value of the boundary position pixel point in the map is described as: image.at(i,j)=76, i, j is the row and column coordinates of pixels in the indoor environment map; the pixel value of the area outside the boundary of the map is: im...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More