High-precision cantilever type six-axis welding robot
A welding robot and cantilever technology, applied in welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., can solve the problems of complex structure, expanding the working range of welding robots, waste of degrees of freedom, etc., and achieve the effect of expanding the working range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0020] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some of the embodiments of the present invention, not all of them; based on The embodiments of the present invention and all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
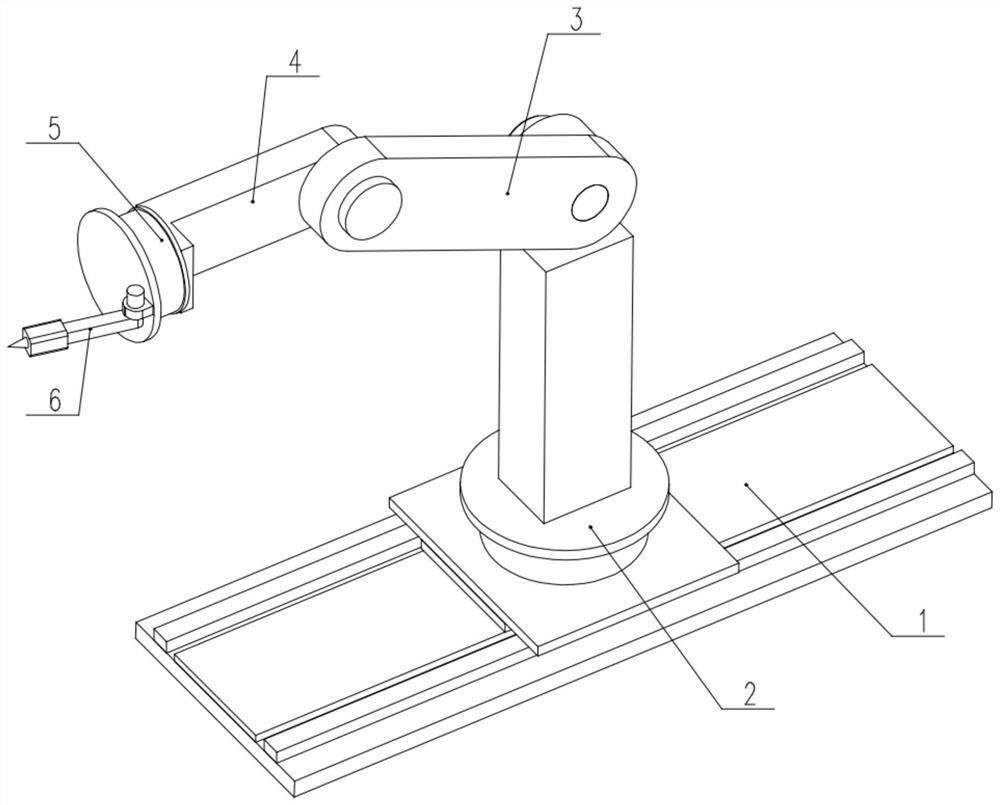
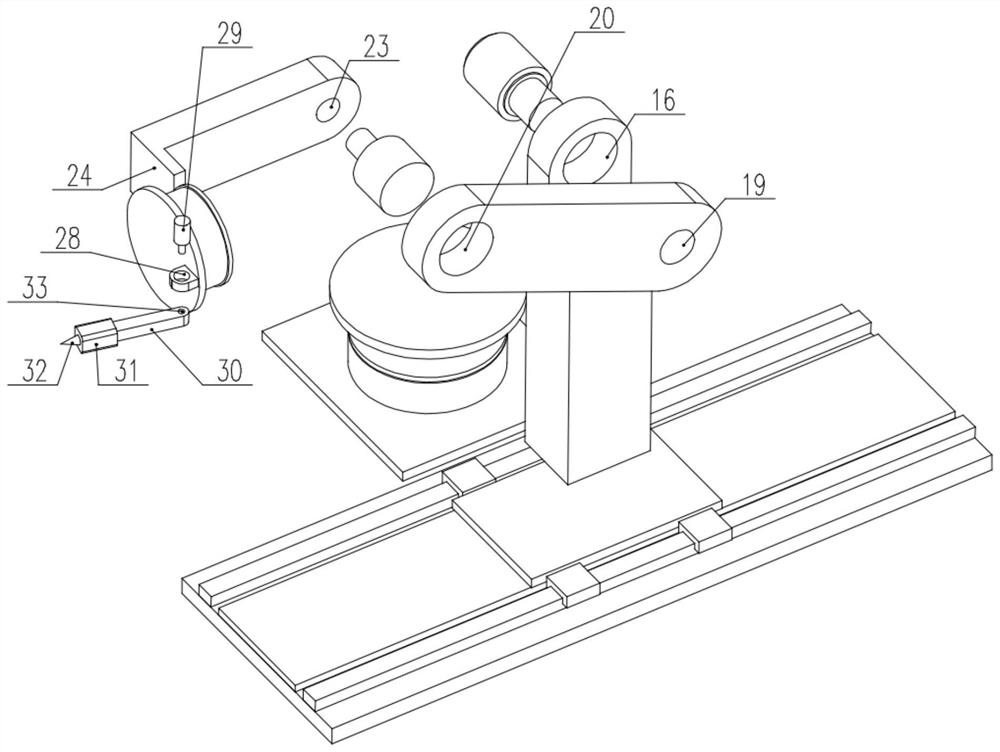
[0021] Such as Figure 1-6 As shown, a high-precision cantilever type six-axis welding robot of the present invention includes a linear motion device 1, a Y-axis rotation device 2, a large arm rotation device 3, a small arm rotation device 4, a wrist rotation device 5 and a finger rotation device 6. The Y-axis rotating device 2 is arranged on the linear motion device 1, the boom rotating device 3 is arranged on the Y-axis rotating device 2, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More