

Collision structure and robot of a kind of robot
A robot and pressure sensor technology, applied in the field of robots, can solve the problems of large collision resistance, uneven force, poor collision induction feedback effect, etc., and achieve the effect of high adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
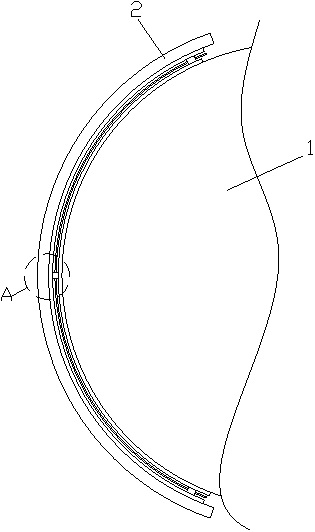
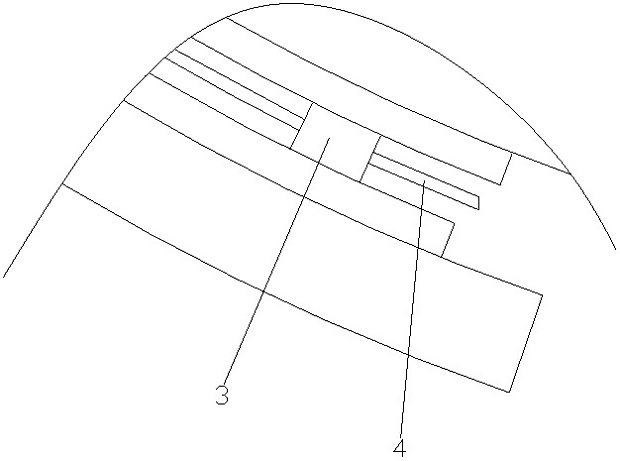
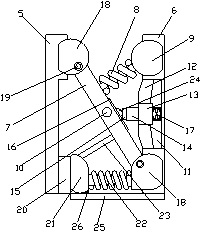
[0029] Such as Figure 1-4 As shown, a collision structure of a robot includes a mounting part 1 and a collision part 2, a buffer device 3 is arranged between the installation part 1 and the collision part 2, and more than one buffer device 3 is provided, and the buffer device 3 is provided with a satellite shaft 4 and the adjacent buffer device 3 is connected through the satellite shaft 4. The buffer device 3 includes a satellite board 5 and a mounting board 6, and the satellite board 5 is fixedly connected with the collision part 2. The mounting plate 6 is fixedly connected to the mounting portion 1, and a connecting rod 7 is arranged between the satellite plate 5 and the mounting plate 6, and the two ends of the connecting rod 7 are respectively connected to the mounting plate 6 and the satellite plate 5 in rotation and arranged obliquely. The connecting rod 7 is provided with a first buffer spring 8, one end of the first buffer spring 8 is perpendicular to the connecting r...
Embodiment 2
[0032] Such as Figure 1-4As shown, a collision structure of a robot includes a mounting part 1 and a collision part 2, a buffer device 3 is arranged between the installation part 1 and the collision part 2, and more than one buffer device 3 is provided, and the buffer device 3 is provided with a satellite shaft 4 and the adjacent buffer device 3 is connected through the satellite shaft 4. The buffer device 3 includes a satellite board 5 and a mounting board 6, and the satellite board 5 is fixedly connected with the collision part 2. The mounting plate 6 is fixedly connected to the mounting portion 1, and a connecting rod 7 is arranged between the satellite plate 5 and the mounting plate 6, and the two ends of the connecting rod 7 are respectively connected to the mounting plate 6 and the satellite plate 5 in rotation and arranged obliquely. The connecting rod 7 is provided with a first buffer spring 8, one end of the first buffer spring 8 is perpendicular to the connecting ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More