

Method for detecting overall dimension of running vehicle based on binocular vision
A binocular vision and detection method technology, applied in the field of computer vision, can solve the problems of inability to apply vehicle outline dimension measurement, inability to save vehicle management information, inability to recognize vehicle license plates, etc. Imaging effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0138] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments, and the technical solutions in the embodiments of the present invention will be described completely and clearly.
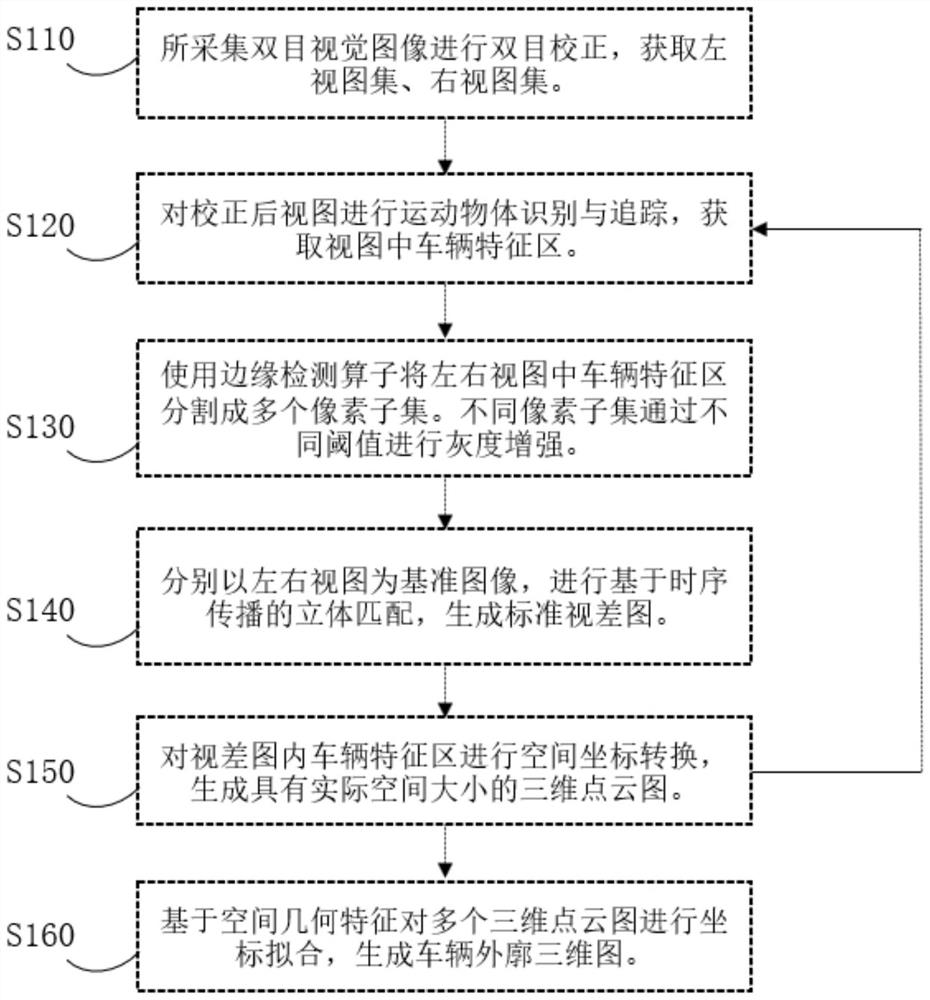
[0139] see figure 1 , the specific implementation process of the binocular vision-based detection method for the outline size of a traveling vehicle provided by the present invention, including:
[0140] S110 performing binocular correction on the collected binocular vision images to obtain a left view set and a right view set.
[0141] In this specific implementation manner, Zhang Zhengyou's calibration method is used to calibrate the binocular camera. Zhang Zhengyou’s calibration method is as follows: 1. Print a checkerboard calibration drawing and paste it on the surface of the screen object; 2. Take a set of pictures of checkerboards in different directions by moving the calibration picture. 3. For each chessboard picture taken, dete...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More