

Parking and parking method based on vehicle, electric shovel, and cloud integration for unmanned transportation in mining areas
A technology for electric shovels and mining areas, applied in the field of autonomous driving, can solve the problems of low parking efficiency, slow response speed, and variability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
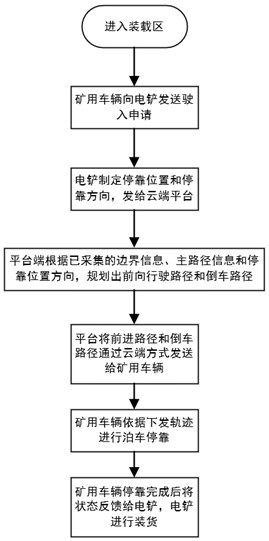
[0045] Step 1: The mining vehicle enters the loading area. The definition of the loading area is generated by the high-precision map, which is artificially divided according to the working environment. The loading area is the drivable area where the vehicle performs a U-turn and drives to the loading point when performing loading operations.
[0046] Step 2: The mining vehicle sends an entry application to the electric shovel. There are two ways for the mine vehicle to send the entry application to the electric shovel, vehicle-to-vehicle communication (V2V) or vehicle-to-network communication (V2N), and one of the two can deliver the message.
[0047] Step 3: The electric shovel formulates the docking position and docking direction, and sends them to the cloud platform. According to the current actual operating environment, the electric shovel uploads the optimal docking position and heading information to the cloud platform through the network.
[0048]Step 4: The cloud pla...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More