

Intelligent bionic prosthetic hand
A prosthetic hand and intelligent technology, applied in the field of bionic hands, can solve the problems of high cost, less freedom of fingers, narrow range of objects, etc., and achieve the effect of increasing friction, good anti-slip effect, and flexible operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The technical solutions of the present invention will be clearly and completely described below in conjunction with the accompanying drawings. Apparently, the described embodiments are some of the embodiments of the present invention, but not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
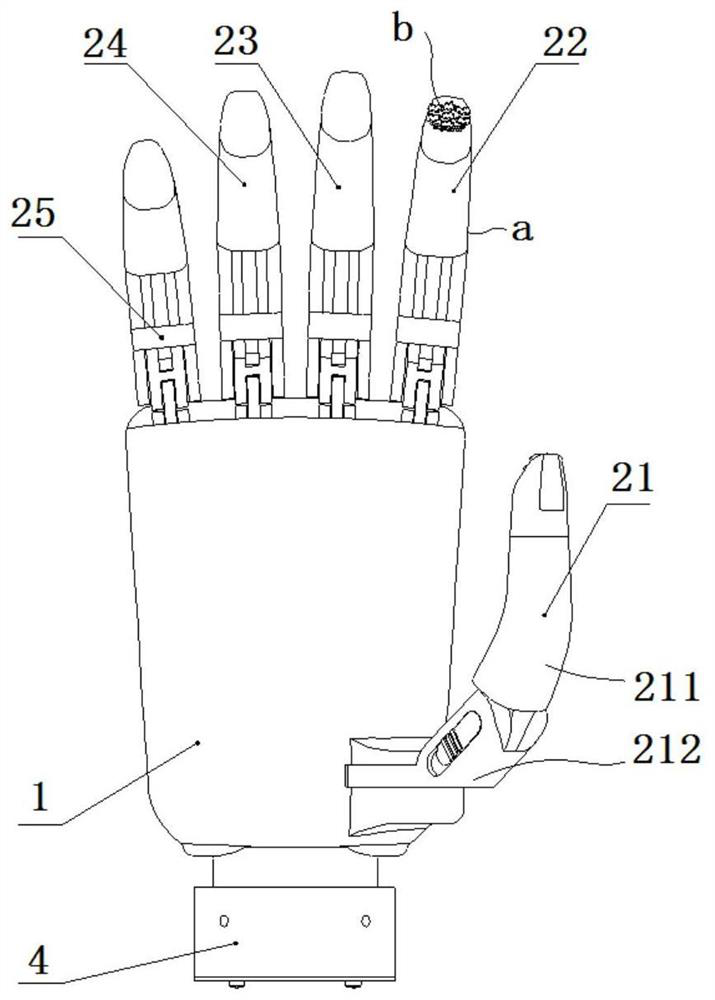
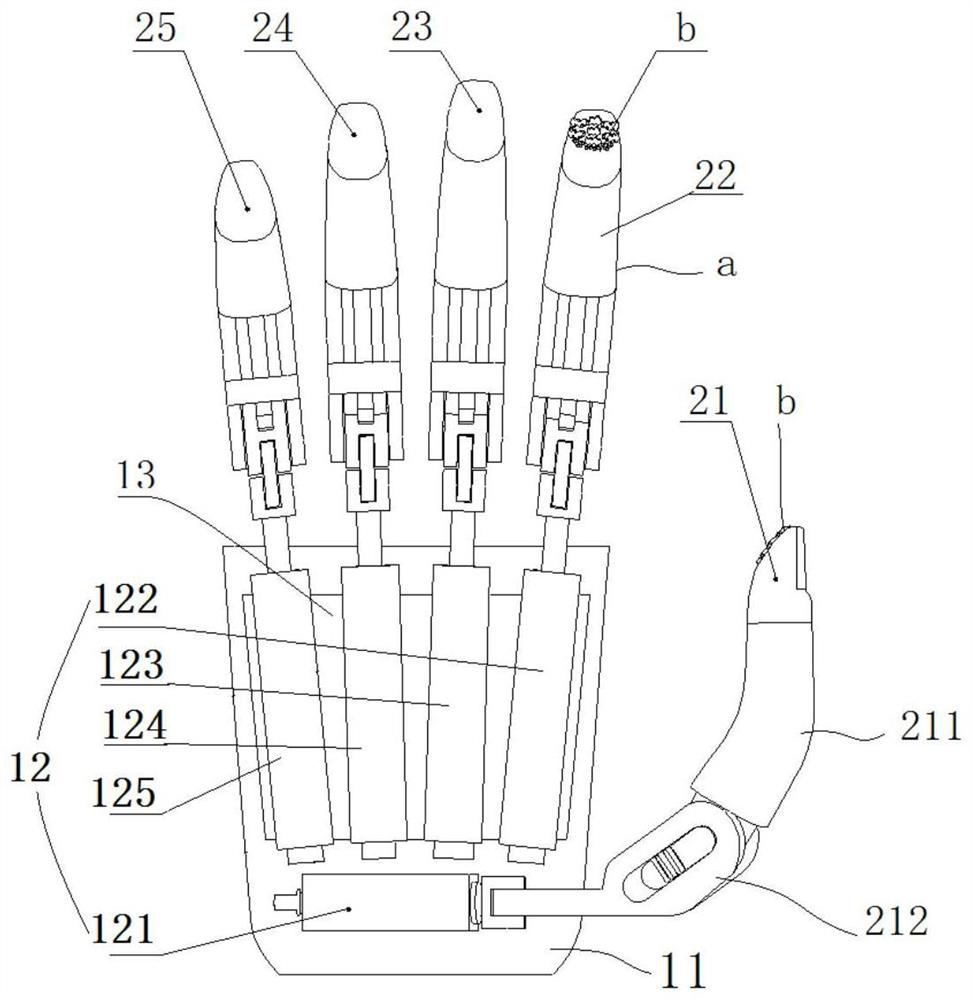
[0051] like figure 1 and figure 2 As shown, the present invention provides a prosthetic hand, comprising a palm assembly 1 and a finger assembly 2, wherein the finger assembly 2 at least includes a thumb assembly 21 and a forefinger assembly 22, the palm assembly 1 includes a housing 11 and a driving device 12, and the housing A chamber is formed in the body 11, and the driving device 12 is arranged in the chamber, and forms an independent driving connection with each finger assembly 2 located at the upper e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More