

Controllable mobile inspection robot
An inspection robot and controllable technology, applied in the direction of manipulator, TV, color TV, etc., can solve the problems of inability to cross obstacles, time-consuming and laborious underground data measurement, unstable structure, etc., to improve safety and reliability, Reduce the waste of manpower and material resources and respond in a timely manner
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
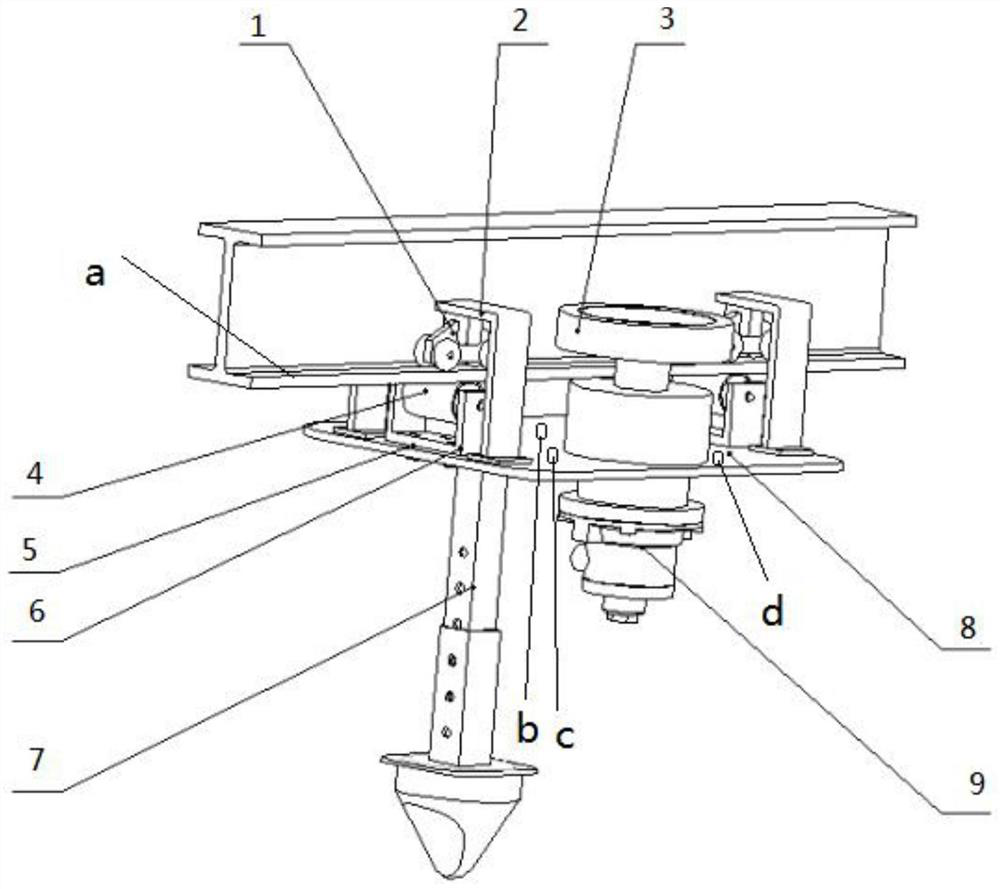
[0018] see figure 1 , the present invention provides a technical solution: a controllable mobile inspection robot includes a supporting wheel mounting frame 1, a supporting wheel 2, an output drive wheel 3, a bottom supporting wheel 4, a disc spring 5, and a bottom supporting wheel mounting frame 6. Camera installation frame 7, mounting plate 8 and power output device 9, described mounting plate 8 is positioned at slide rail a below, and power ou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More