

Robot attitude adjusting method and device, robot and storage medium
An adjustment method and robot technology, applied in the field of robotics, can solve problems such as the difficulty in obtaining precise control of the robot's posture, and achieve the effect of overcoming error accumulation and improving performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
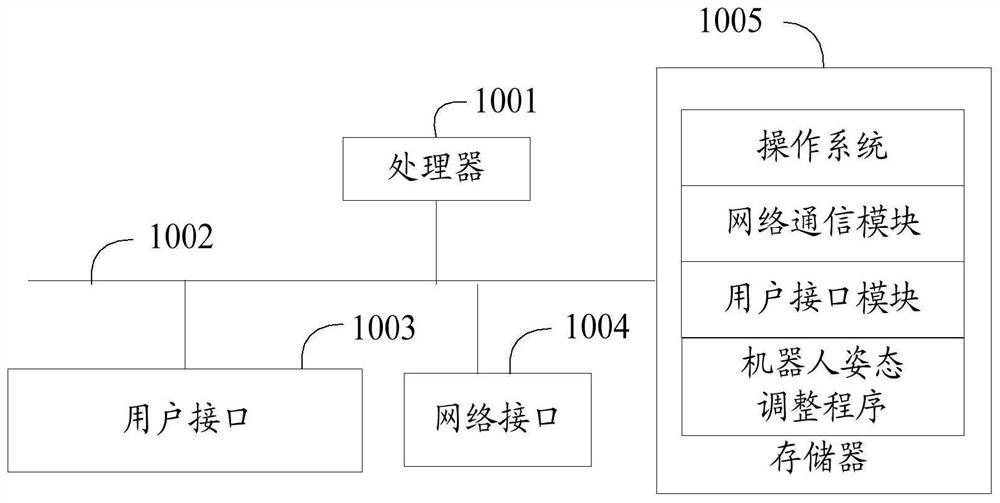
[0048] Such as figure 1 as shown, figure 1 It is a schematic diagram of the robot structure of the hardware operating environment involved in the solution of the embodiment of the present invention.
[0049] In the following description, use of suffixes such as 'module', 'part' or 'unit' for denoting elements is only for facilitating description of the present invention and has no specific meaning by itself. Therefore, 'module', 'part' or 'unit' may be used in combination.
[0050] The robot (also called terminal, device or terminal device) in the embodiment of the present invention may be a mobile robot with data processing capability and automatic positioning and navigation function, or a controllable robot connected by communication with a terminal with data processing capability and positioning and navigation fu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More