Path planning method
A path planning and path technology, applied in vehicle position/route/height control, non-electric variable control, instruments, etc., can solve the problems of lack of map understanding, not the shortest, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0032] The present disclosure will be further described below in conjunction with the accompanying drawings and embodiments.
[0033] Such as figure 1 As shown, a path planning method is provided in one of the embodiments of the present invention. In this embodiment, the path planning method is a scene memory path planning method based on memory fusion, and the path planning method includes the following steps:
[0034] S1: Based on the episodic memory model, use the RatSLAM algorithm to establish an experience map and a corresponding episodic cognition map;
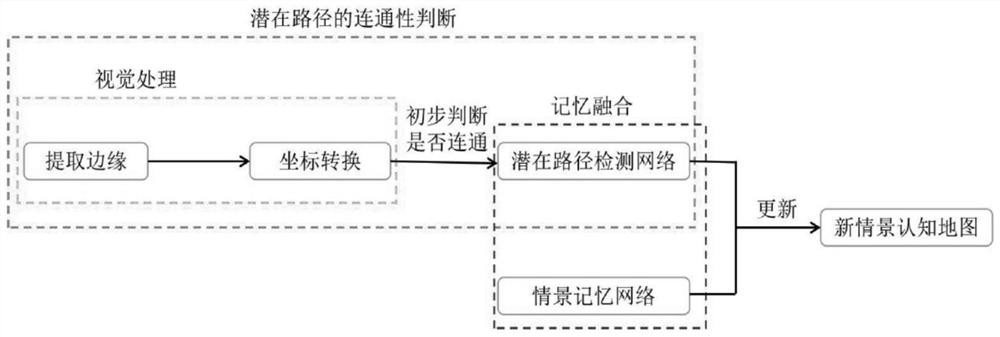
[0035] S2: extract the road edge in the historical memory image by the Canny operator;
[0036] S3: transforming from the pixel coordinate system to the world coordinate system based on the road edge, and making a preliminary judgment on the connectivity according to the slope of the road edge;
[0037] S4: According to the continuous observation of the potential path, continuously inject energy into the potential path...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More