

Multi-policeman cooperative hunting task allocation and path planning method under road network constraint
A technology for path planning and task assignment, applied in the directions of road network navigators, measuring devices, instruments, etc., and can solve the problems of neglecting constraints and difficulty of trajectory prediction.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
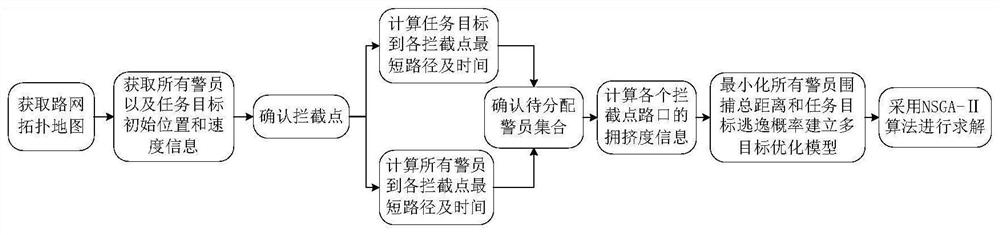
[0045] Such as figure 1 As shown, a multi-police officer cooperative roundup task assignment and path planning method under the constraints of the road network includes the following steps:
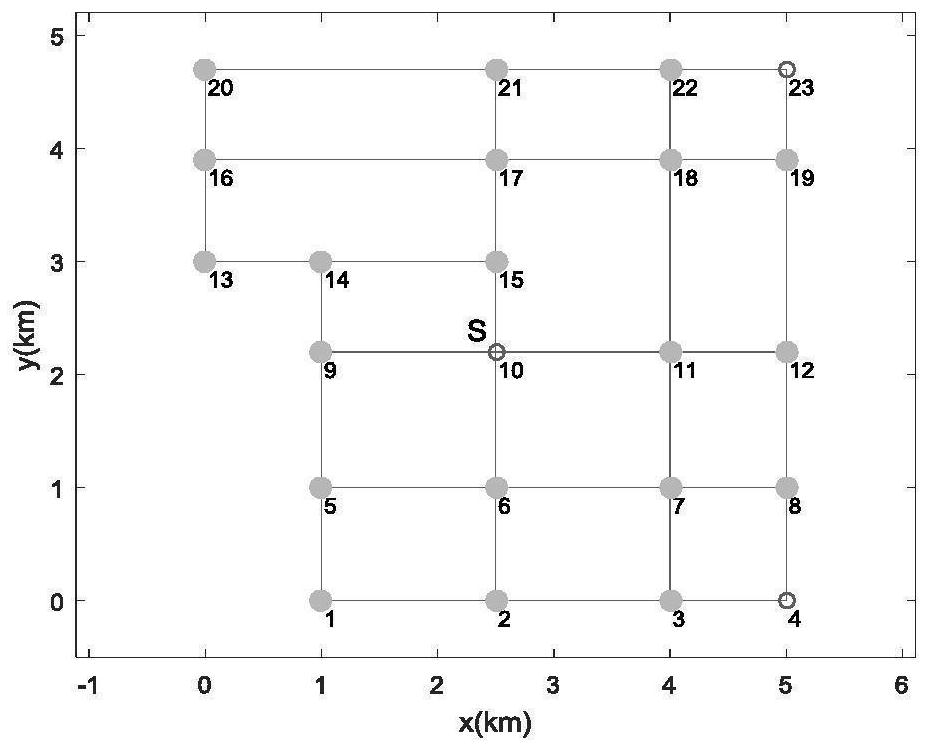
[0046] 1) Obtain the road topology map G=(V, E) of the road network, where the edge E of the graph represents the road, and the node V represents the intersection;
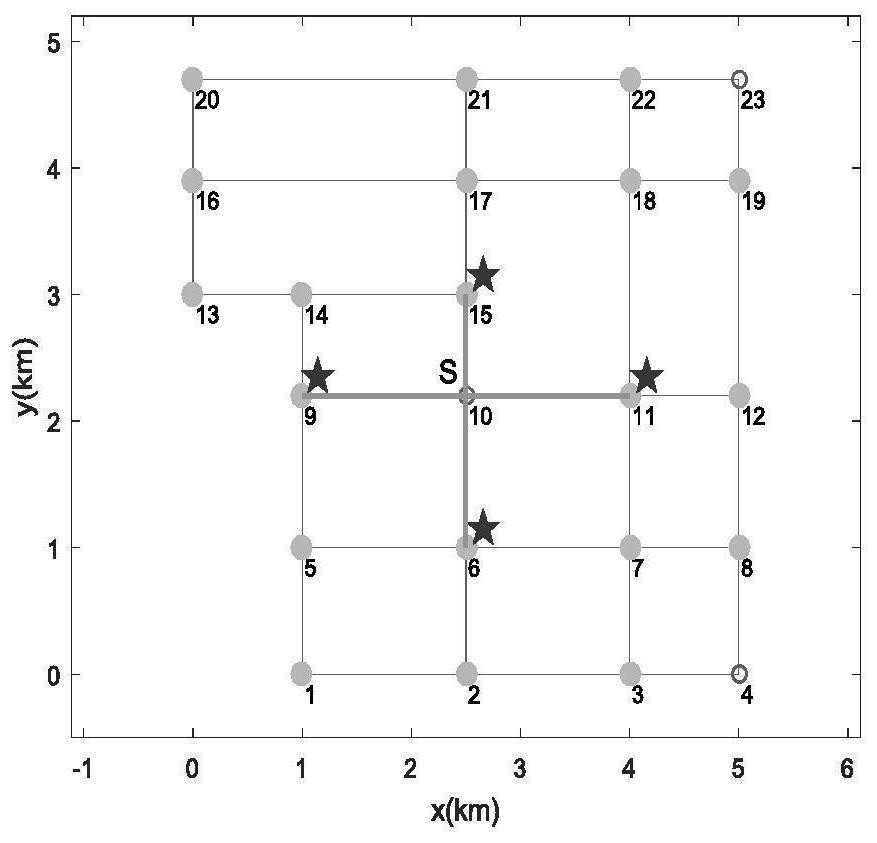
[0047] 2) Obtain police distribution information and task target position information in the road network G, and the task target position is obtained through camera detection and identification in the road network;
[0048] 3) According to the position where the task tar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More